Исследовательская работа «В мире робототехники»
III научно-практическая конференция
«Первые шаги в науку»
Направление: В мире робототехники
Название работы: «Роботы — прошлое, настоящее, будущее».
Автор работы: Кобзев Сергей
МАОУ г. Ростова-на-Дону «гимназия №76 имени Героя Советского Союза Никандровой А.А.», 1 Б класс Научный руководитель: Карпова Светлана Александровна
Содержание:
Введение ………………………………………………………………………………….…3
Цель исследования………………………………………………………………………3
Актуальность исследования………………………………………………………… 3
Задачи исследования……………………………………………………………………3
Ход исследования
Основные законы робототехники………………………………………..4
Краткая история развития робототехники…………………………..5
Фантастика или реальность………………………………………………..6
Области применения роботов ……………………….…..………………7
Роботы в ближайшем будущем………………………………………….14
Выводы………………………………………………………………………………………14
Список использованных источников информации……………………….15
Введение
Тема моей исследовательской работы «Роботы — прошлое, настоящее, будущее». Сегодня эта тема очень актуальна и интересна моему поколению. Мне, как и многим моим друзьям интересны передачи, фильмы и мультфильмы про трансформеров и роботов начиная от игрушек и героев фильмов до роботов, которые окружают нас в жизни.
Цель моего исследования:
выяснить, что означает слово робот;
понять каким должен быть робот и узнать законы создания роботов;
изучить историю появления роботов;
найти интересные факты создания роботов от фантастики до реальности;
разобраться какие бывают роботы, где их можно встретить и применить, а также как они влияют на нашу жизнь
Актуальность моего исследования заключается в том, что роботы уже стали частью нашей повседневной жизни, мы просто можем даже не знать этого и не замечать. Считаю, что каждому человеку, а особенно нам – школьникам важно и нужно знать историю создания роботов, знать, как развивается робототехника, где она применяется.
Так как объектом исследования послужили роботы в жизни людей, то мною были поставлены следующие задачи для исследования:
— изучить основные законы робототехники;
— изучить краткую историю развития роботов и робототехники;
— исследовать и разделить роботов современности по областям их применения;
— проанализировать каким будет развитие робототехники.
Предполагаю, что роботы это часть жизни человека и его помощники.
В ходе исследования мы будем часто применять слово робот, но что же на самом деле робот обозначает?
Как оказалось слово «робот» было придумано чешским писателем Карелом Чапеком и в переводе с чешского языка robot (от robota) означает «подневольный труд». В ранних русских переводах означало слово «работарь». Впоследствии, как я выяснил, этому слову было дано следующее определение «Робот – это механическое или виртуальное искусственное устройство, обычно электромеханическая машина, действующая под руководством компьютерной программы или электронной схемы».
Основные законы робототехники
В свободной энциклопедии я прочитал, что впервые законы робототехники формулирует в 1942 г. Айзек Азимов, написавший серию рассказов о роботах:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
2. Робот должен подчиняться командам человека, если эти команды не противоречат первому закону.
3. Робот должен заботиться о своей безопасности, пока это не противоречит первому и второму законам.
Но от себя хотел бы добавить, что сейчас в мире столько угроз и «плохих» людей, что три основных закона могут не сработать в руках людей желающих принести хаос и разрушение.
Краткая история развития робототехники
Меня очень заинтересовала история развития роботов и робототехники, и я принялся за ее изучение. Как оказалось первое упоминание о роботах встречается в середине III тысячелетия до нашей эры, когда у египтян появилась идея создания «думающих» машин. Для этого внутри статуй прятались жрецы, которые делали предсказания и давали советы. В еврейской мифологии рассказывается, что царь Соломон в 10-ом веке до нашей эры построил трон с механическими животными, которые приветствовали его, когда он садился на него — орёл возлагал корону на его голову, голубь приносил ему свиток Торы, а золотые бык и лев помогали ему подняться на трон. Дальнейшая история развития робототехники неразрывно связана с развитием науки и техники, с открытием электричества.
Также я выяснил, еще Леонардо да Винчи спроектировал (а, возможно, собрал и испытал) механического рыцаря, облачённого в броню. Он явился первым человекоподобным роботом.
Уже во второй половине 20-го века роботы активно стали использоваться в кинематографии, промышленности, медицине, а также в военной сфере. Далее я постараюсь подробнее остановиться на робототехнике нашего времени.
Фантастика или реальность
Исследуя данную тему, мне сразу вспомнились примеры одной из моих любимых фантастических книг «Девочка с Земли» писателя Кира Булычёва. В ней писатель более 50-ти лет назад фантазирует о жизни в 21-м веке, о роботах, которые будут населять планету Земля, о том, как будет развиваться робототехника, и как оказалось очень многое стало реальностью.
Цитирую «Я подошел к видеофону и наугад нажал несколько кнопок. Я был уверен, что соединения не будет. Но я ошибся. Экран видеофона просветлел, загорелся ярче, раздался щелчок – кто-то нажал кнопку приема на другом конце линии, и еще не успело появиться на экране изображение, как сонный голос сказал: — Марсианское посольство слушает. Я повернулся к видеофону. На меня смотрел молодой марсианин» (Цит. по кн. [2, с.9-10])
А сейчас в нашей жизни это всего лишь компьютер и установленная на нем программа Skype, которая позволяет общаться и видеть людей из разных точек земного шара.
Рис.1

А описанный в рассказе робот – домработник, также стал частью нашей жизни и помощником, которому теперь никто не удивляется.
Цитирую «Мы поспорили. И не успели разнять руки, как в коридоре задрожали стены. Громозека шел обратно. Он был мокрый, вода лилась по его панцирю, и щупальца оставляли неровные мокрые полосы на полу. Сзади шел робот – домработник с тряпкой и подтирал за гостем пол.» (Цит. по кн.[2, с.394]
А сейчас это всего лишь современный робот пылесос с возможностью влажной уборки, который уже имеется во многих семьях.
Рис.2

Области применения роботов
В ходе моего исследования и сбора информации я выяснил, что роботы применяются практически во всех областях и сферах нашей жизни и их можно разделить на следующие группы:
Строительные роботы;
Промышленные роботы;
Бытовые роботы;
Транспортные роботы;
Сельскохозяйственные роботы;
Боевые роботы;
Исследовательские роботы;
Медицинские роботы
Так как я уже разобрался, в каких областях применяются роботы, то сейчас хочу немного остановиться на каждом и привести примеры использования роботов в нашей жизни. Например, строительные роботы их очень много и основная их часть выполняет операций, связанных с ремонтом и строительством зданий. На рис.3 представлен управляемый робот с двумя руками — манипуляторами, которые можно оснащать различными инструментами. Предназначен он для разборки завалов, например, после землетрясений. Может применяться также для сноса здания и уборки стройплощадок.
Рис. 3

Промышленные роботы меня интересуют особенно, т.к. моя мама работает на комбайновом заводе «Ростсельмаш» и очень часто мне рассказывает, как комбайны убирают пшеницу, рис, семечку. И когда я начал исследовать область робототехники, то спросил у мамы: «А есть ли на заводе роботы?» Оказалось, что есть и их очень много, и чтобы комбайн выехал в поле трудиться и убирать пшеницу, множество роботов работают и помогают человеку произвести машину комбайн. На рис.4-6 представлены промышленные роботы, которые используются при производстве зерноуборочных и кормоуборочных комбайнов. Данные роботы при помощи установленных программ осуществляют раскрой металла, сгибают его, разрезают лазером и лазерной сваркой соединяют части конструкций.
Рис.4
Рис.5
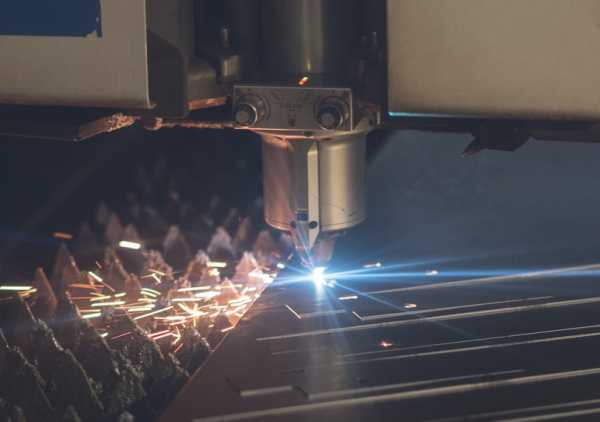
Рис.6

Также я выяснил, что существуют бытовые роботы — это различные «домохозяйки» и «уборщики». К ним относятся и робоигрушки для развлечения и обучения детей.
Рис.7
Исходя из изученного материала, очень быстро сейчас развивается транспортная робототехника. Такие роботы помогают передвинуть объект от точки А до точки Б. На рис.8 представлен современный вид транспортного робота — гироскутер.
Рис.8

По телевизору наш президент В.В.Путин часто говорит о развитии сельского хозяйства и животноводства. И тут робототехника шагнула вперед, и например, доят коров теперь не доярки, а сельскохозяйственные роботы.
Рис.9

А еще мне, как думаю и любому мальчишке интересно развитие боевых роботов — они призваны избавить человека от участия в военных операциях. Роботы беспилотники, роботы-сапёры, роботы-минёры, патрульные роботы.
На рис.10 изображен беспилотный летательный аппарат, который может вести воздушную разведку, осуществлять сбор секретной информации. Для беспилотных летательных аппаратов не нужно специальных аэродромов и в случае аварии пилот не пострадает, т.к. его просто нет.
Рис.10

На сайте kosmokid.ru я прочитал очень много интересной информации об исследовании планет, при которых использовались Исследовательские роботы — это различные луноходы, марсоходы.
Рис.11

А еще с роботами мы очень часто встречаемся в современных медицинских кабинетах и порой даже не задумываемся об этом. Медицинские роботы – это различные диагностические комплексы и системы. К медицинским роботам относятся также робопротезы.
Рис.12

Роботы в ближайшем будущем
В ходе сбора информации мне удалось выяснить, что по мнению ученых развитие роботов и робототехники с каждым годом всё больше будет развиваться и множество различных операций будет роботизироваться. Такие простые дела как работа аптекаря или библиотекаря в книгохранилище будут отданы роботам. Появятся на улицах роботы-уборщики, роботы-погрузчики.
Сейчас автомобили помогают водителям парковаться, но в будущем они возьмут на себя весь процесс вождения. Например, в США уже тестируются не только беспилотные автомобили, но и беспилотные комбайны.
Выводы
Проделав данную работу по изучению робототехники, я делаю вывод, что Роботы являются неотъемлемой частью жизни современного человека в различных сферах деятельности. То, что раньше было лишь фантазией и смелыми мыслями, сегодня во многом воплощено в жизнь и служит на благо и развитие жизни людей. Сегодня взрослые в погоне за развитием и получением прибыли, часто забывают о предназначении роботов, и нам, подрастающему поколению будущим исследователям, инженерам, конструкторам хочу сказать: «всегда помните об основных законах робототехники».
Список использованных источников информации
Кир Булычев «Девочка с Земли»
Статья Раисы Чудновской «Роботы – прошлое, настоящее, будущее»
kosmokid.ru
www.scienceforum.ru
https://ru.m.wikiversity.org/wiki/Роботы_в_медицине
https://ru.m.wikipedia.org/wiki/Робототехника
xn--j1ahfl.xn--p1ai
Научно-исследовательская работа «Роботы. Как они устроены?»
19
V районная научно-практическая конференция
«Первые шаги в науку»
посвященная 70-летию Победы в Великой Отечественной войне
1941-1945 годов
«Роботы. Как они устроены?»
Автор: Полянский Даниил
ученик 3Б класса
Руководитель: Гусенкова И.Ю.
учитель начальных классов МБОУ КСОШ №1
Княгинино
2015 г.
Рецензия на исследовательскую работу
ученика 3«б» класса МБОУ Княгининской СОШ №1
Полянского Даниила
«Роботы. Как они устроены?»
В представленной научно-исследовательской работе рассмотрены вопросы создания, устройства и значения роботов в современном мире и жизни людей. Содержание работы соответствует заявленной теме и излагается в соответствии с удачно составленным планом.
В разделе «Введение» определена тема, цели и задачи работы, объект исследования, выдвинута гипотеза, а также перечислены методы исследования.
Теоретический материал соответствует теме исследования: описаны различные виды роботов, строение современных роботов. Заслуживает полной поддержки стремление автора основательно разобраться в терминологии.
Особый интерес вызывает исследовательская часть работы. Проведен ряд исследований. Это опрос учащихся. Видно, что ребенок грамотно и с интересом выполнял работу. По результатам опроса сделаны выводы.
Проведена работа по созданию модели робота EV3 и работе сенсорных датчиков.
Выдвинутая гипотеза достаточна грамотно и убедительно подтверждается материалами работы. В процессе исследования применялись теоретические (изучение научно–популярных изданий; работа с интернет-ресурсами), опрос и анкетирование одноклассников и метод конструирования.
Материалы работы дают понять, что исследователь предварительно внимательно изучил теорию по данной теме, а затем на основе изученного провел исследовательскую работу и сделал собственные выводы. К работе выполнена яркая, красочная презентация.
Работа удовлетворяет требованиям, предъявляемым, к ученическим исследовательским работам.
Учитывая сложность предмета исследования, творческий подход и глубину анализа полученного материала, считаю, что работа заслуживает высокой оценки, так как может быть удачно использована на уроках окружающего мира, в работе кружка и на классных часах.
Руководитель: Гусенкова И.Ю.
Аннотация
В представленной научно-исследовательской работе рассмотрены вопросы создания, устройства и значения роботов в современном мире и жизни людей. Описаны различные виды роботов. Проведена работа по созданию модели робота EV3 и работе сенсорных датчиков.
Оглавление
ВВЕДЕНИЕ……………………………………………………………..………..….5
История создания и развития роботов..………….…………….7
Эволюция роботов.……………………………………………………7
Происхождение слова робот. Три закона робототехники ………….11
Классификация роботов………………………………………………12
Устройство роботов и основные принципы работы..…..16
Строение современных роботов……………………………………..16
Результаты анкетирования одноклассников…………………………20
ЗАКЛЮЧЕНИЕ…………………………………………………..…………….….22
Список использованных источников информации……………23
ПРИЛОЖЕНИЯ ……………………………………………………………………24
Введение
Слово «робот» прочно вошло в современную речь и нашу жизнь. Трудно представить себе мир XXI века без «умных» машин. Они проникли всюду: от заводских цехов и медицины до вооружения наиболее развитых армий мира. И, конечно, редкий фантастический фильм обходится без самостоятельных думающих механизмов, которые известны под термином «робот».
Термин «робот» пришел к нам от чешского слова «robota», что буквально означает «принудительный труд». В принципе, это слово отлично описывает большинство роботов. Чаще всего роботы делают тяжелую работу, монотонно трудятся на производстве. Также они решают задачи, которые сложны, опасны или скучны для людей. Беспилотные самолеты-разведчики, искусственные спутники, знаменитые луноходы – все это роботы. Однако наиболее впечатляющая мечта человечества – человекообразная машина, описанная писателями-фантастами.
Цель данной работы – изучение истории появления роботов, их роли в жизни людей и ознакомление с типовой конструкцией робота.
Объектом исследования послужили роботы в современной жизни людей.
В соответствии с данной целью были поставлены следующие задачи:
рассмотреть виды роботов;
опросить одноклассников: какие роботы их окружают в жизни и знают ли они конструкцию роботов;
создать модель робота с несколькими датчиками.
Методы исследования: теоретические (изучение научно–популярных изданий; работа с интернет-ресурсами), опрос и анкетирование одноклассников и метод конструирования.
Гипотеза:
Актуальность: Тема роботов очень интересна. По телевизору часто показывают программы и фильмы про роботов, в которых они помогают людям в жизни и даже могут вместо человека делать какую-нибудь сложную работу. В жизни мы часто сталкиваемся с роботами. Например, дома у многих есть игрушки на радиоуправлении, у всех есть сотовые телефоны, компьютеры, телевизоры, пылесосы и т.п. Вся эта робототехника во многом помогает и облегчает нашу жизнь.
История создания и развития роботов
Эволюция роботов
Роботы
Одно из определений гласит, что робот — это машина с человекоподобным поведением, которая частично или полностью выполняет функции человека (иногда животного) при взаимодействии с окружающим миром.
Ро́бот (чешское robot, от robota — подневольный труд или rob —раб) — автоматическое устройство, созданное по принципу живого организма. Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет различные операции, выполняемые человеком. При этом робот может иметь связь с оператором (получать от него команды), так и действовать автономно [2].
Идея создания роботов появилась очень давно, еще во времена античности. На протяжении всей истории человечества создавались какие-то механизмы: для выполнения работы, для развлечения, для заработка денег или прости из научного интереса.
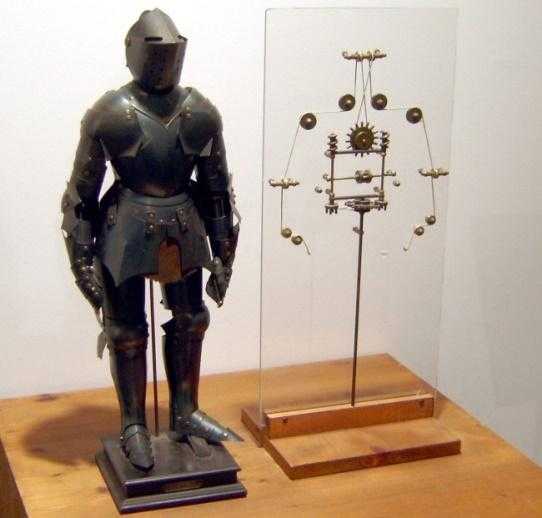
Приблизительно в 1495 г. Леонардо да Винчи спроектировал (а возможно собрал и испытал) механического рыцаря, облачённого в броню, по видимости являющегося первым роботом. Внутри доспехов находился механизм, приводящий в движение искусственного человека при помощи тросов и роликов, создавая иллюзию, что там внутри есть живой человек. Рыцарь-робот умел садиться, двигать головой и руками, анатомически правильно открывать и закрывать рот. Также, он мог имитировать звуки — шёл под сопровождение барабанов.
В дневниках Леонардо появляется набросок суммирующей вычислительной машины на зубчатых колесах, способной складывать 13-разрядные десятичные числа. Его суммирующую машину можно считать изначальной вехой в истории вычислительной техники.
В 1500 году Леонардо да Винчи строит механического льва, который при въезде короля Франции в Милан выдвигался, раздирал когтями грудь и показывал герб Франции [1].
Первого действующего человекоподобного робота создал французский изобретатель Жак де Вокансон в 1737 году. Андроид представлял из себя человека в натуральную величину способного на флейте. Флейтист Вокансона имел в репертуаре 12 произведений.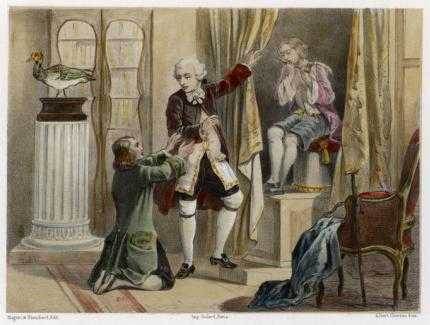
К концу XIX века инженер из России Чебышев Пафнутий придумал механизм — стопоход, который обладал высокой проходимостью. Это была первая попытка создания транспортного средства. Конечно, это изобретение не представляло огромной пользы для человечества, но сама задумка дала определенный толчок к развитию технологий роботостроения [1].
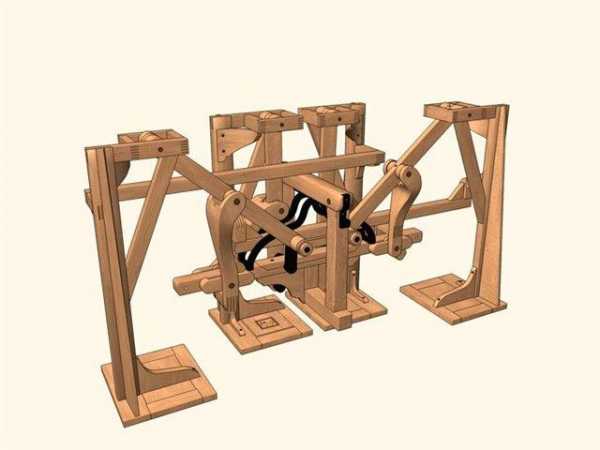
Рисунок 3 – Стопоходящая машина Чебышева
В 1893 году американским профессором Арчи Кемпионом был представлен опытный образец робота Boilerplate.

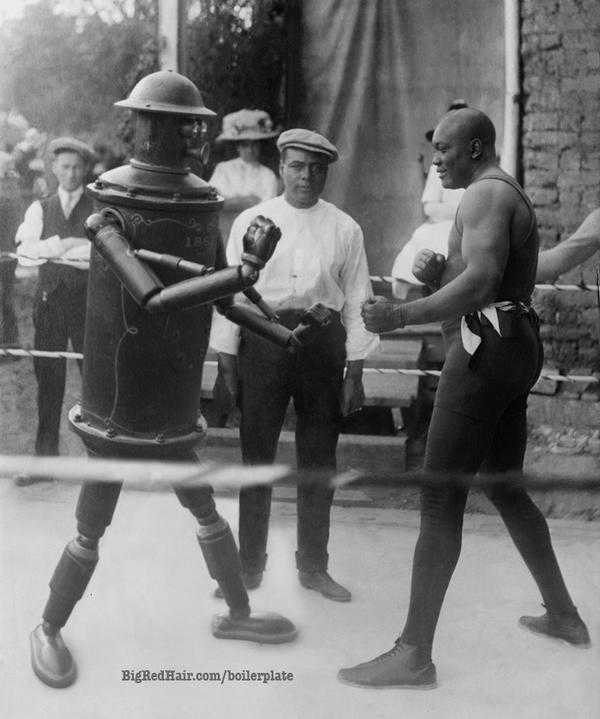
Рисунок 4 – Boilerplate
Хотя робот существовал в единственном экземпляре, Boilerplate неоднократно участвовал в боевых действиях.
После изобретения в 1940 году компьютера, стали появляться электронные промышленные роботы. Первым роботом, освободившим человека от трудной и опасной работы, в 1962 году стал робот «Юнимейт». Он работал на автомобильном заводе «Дженерал моторс», его работа заключалась в передаче и перемещении горячих деталей после их изготовления.
В 1993 году был создан восьминогий ходящий робот Dante. Робот совершит неудачную попытку спуститься в один из антарктических кратеров для сбора данных в тяжелой для человека среде.
Sony представил развлекательного робота-собаку AIBO, модель ERS-11. Два десятка моторов управляют движениями ног, головы и хвоста.
Данные с цветной цифровой камеры, двух микрофонов и тактильных датчиков подаются на микропроцессор, управляющий поведением робота.
Компания Probotics выпустила простых мобильных персональных роботов Cye, которые могут использоваться для выполнения ряда простейших домашних хозяйственных работ.
NEC представляет яйцевидный трехколесный домашний робот R100, повинующийся голосовым командам, который записывает и отправляет видеопочту по Интернет, а также может включать кондиционеры, телевизоры и видеомагнитофоны посредством инфракрасного пульта дистанционного управления. В новой модификации, которая появилась в 2004 году робот будет способен на слух и практически синхронно переводить с японского языка на английский и наоборот.
Honda представила Asimo — следующее поколение своего ряда гуманоидных роботов. Он меньше по размеру и более проворен, чем его предшественники: весит 43 кг при росте 120 см. По мнению разработчиков, комплекция Asimo идеальна для перемещения по дому, открывания дверей и выполнения таких работ, как протирка стола и стульев.
Sony представляет своего гуманоидного развлекательного робота SDR-3X на выставке Robodex — расшифровывается как Робот Мечты Sony (Sony Dream Robots). Рост робота -50 см, вес — 50 кг. SDR-3X демонстрирует быстрый шаг, гимнастические телодвижения и даже изображает танец диско. Система работает в реальном времени под управлением собственной операционной системы Sony Aperios.
Происхождение слова «робот». Три закона робототехники
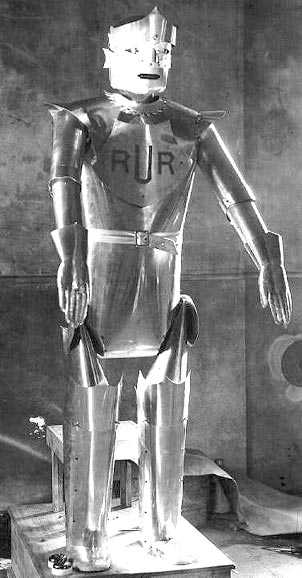
Слово «робот» вошло в речь с легкой руки чешского писателя Карела Чапека. В своей пьесе RUR («Россумские Универсальные Роботы»), опубликованной в 1920 г. он описал фабрику, производящую «искусственных людей», которых и называл роботами.
Вот отрывок из статьи Карела Чапека, в которой вся эта история рассказывается в деталях самим Чапеком: «… это было так: идея пьесы пришла писателю в один неподходящий момент. Но, пока она была еще теплой, он поспешил к своему старшему брату Йозефу, художнику, который стоял перед мольбертом и рисовал так, что холст потрескивал.
— Слушай Йозеф, — сказал писатель, — у меня есть идея для пьесы.
— Какая? – пробормотал художник (он действительно пробормотал, потому, что в тот момент держал кисточку во рту. Автор рассказал ему идею так быстро, как только мог.
— Так напиши это, — заметил художник, вынув кисточку изо рта и остановив работу над холстом.
— Но, — сказал автор, — я не знаю, как назвать этих искусственных рабочих. Я хочу назвать Лабори (Labori), но это кажется мне слишком педантичным.
— Ну, назови их Роботы (Robots), — пробормотал художник с кисточкой во рту и подошел к холсту.
Вот так это было. Так родилось слово Робот…»
В 1942 году Айзеком Азимовым в научной фантастике были сформулированы три закона робототехники, т.е. обязательные правила поведения для роботов:
Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому и Второму Законам [3].
Классификация роботов
Так же как и с понятием «робот», в отношении классификации роботов не существует общепринятого мнения, из-за чего в разных изданиях, а также интернет-ресурсах, посвященных робототехнике, можно встретить различные классификации.
Связано это с тем, что по мере развития робототехнического направления промышленности видоизменяются сами машины, их функции постоянно расширяются и неизбежен регулярный пересмотр их разновидностей. Наиболее целесообразно разбиение всех видов роботов на группы по типу выполняемой работы или решаемой задачи, например: промышленные, строительные, сельскохозяйственные, транспортные, бытовые, боевые, охранные, исследовательские.
Промышленные роботы предназначены для автоматизации всевозможных технологических операций (сварка, штамповка, металлообработка, сборка готовых изделий и т.д.) на производстве какой либо продукции. Применяются практически во всех отраслях промышленности (нефтехимическая, автомобильная, авиационная и др.).
Транспортные роботы используются, как следует из наименования для автоматического перемещения грузов, либо автономного управления различными транспортными средствами. Транспортными роботами являются самоходные тележки, автопилоты и т.д.
Бытовые роботы. Данный тип роботов применяется в быту и офисах. Ярким примером является робот-пылесос. К бытовым роботам также можно отнести роботов, обеспечивающих эффект присутствия удаленных друг от друга людей, либо способных самостоятельно вести диалог с человеком, и, конечно, многочисленные робоигрушки, предназначенные для развлечений и образовательных целей. В перспективе ожидается появление и более функциональных систем, умеющих выполнять более сложные домашние обязанности такие как: мытье посуды, стирка грязного белья, приготовление пищи и т. п.
Боевые (военные) роботы предназначены для минимизации участия человека в боевых действиях с целью сокращения или исключения вовсе людских потерь, а также для работы в условиях, несовместимых с возможностями человека в военных целях. Разновидностей боевых роботов столько же, сколько и боевых задач для войсковых подразделений: беспилотные с дистанционным управлением самолеты (вертолеты) — разведчики, подводные аппараты и надводные корабли, роботы-минеры, роботы-саперы, роботы-патрульные, роботы для переноски военной амуниции.
Перед охранными роботами ставятся задачи по защите территорий или помещений. Большинство людей не замечают, что рядом с ними повсюду действуют роботы-полицейские, роботы-охранники и роботы-шпионы. Роботы охраняют важные объекты и добывают секретную информацию о террористах. Роботы-охранники в отличие от охранника-человека могут работать 24 часа в сутки без сна, еды и воды, их трудно отвлечь, и они могут поднять тревогу, если на них совершено нападение.
Робот-шпион «Сайфор» очень похож на летающую тарелку и имеет форму двухметрового бублика. Он может зависнуть в воздухе напротив окна высотного здания, посмотреть, что происходит в помещении, может сбросить подслушивающее оборудование.
«Робарт-III» патрулирует офисы и склады, открывает и закрывает двери и отыскивает проникших в помещение преступников. В его руку встроено устройство, которое может стрелять шестью дротиками со снотворным.
В глазах робота «Марон-1» встроены камеры, которые ведут съемку внутри дома. Если в доме появится посторонний, его фотографию робот передает на мобильный телефон хозяина.
Исследовательские роботы используются для сбора всевозможных видов информации об исследуемых объектах, ее переработки и передаче оператору. Объектами могут быть самыми разнообразными: поверхности планет, подводное пространство, подземные шахты, пещеры, полости эксплуатируемых трубопроводов, зараженная местность и другие труднодоступные для человека области.
Люди отправляют роботов в космос для исследования космического пространства. Например, робот «Соджорнер» был первым роботом-вездеходом, оказавшимся на поверхности Марса. Отсутствие на Марсе кислорода, воды и высокая температура (до 100 градусов) затрудняют исследование этой планеты людьми. Поэтому люди поручили исследование Марса роботам-марсоходам. Такие роботы оборудованы различными сенсорами, инструментами и манипулятором при помощи которых марсоходы могут убирать с пути тяжелые камни и исследовать почву планеты.
Современные мобильные роботы работают во вредных или опасных для человека условиях, т.к. использование мобильных роботов в таких условиях позволяет человеку не рисковать своей жизнью и здоровьем.
Роботы участвуют в операциях по спасению людей при катастрофах, обезвреживают взрывные устройства, отыскивают места утечки опасных газов, чтобы не произошел взрыв. Например, робот — «змея» может двигаться внутри газовой трубы. Его видеокамеры и датчики отыскивают места поломки трубопровода и места утечки газа. Промышленный робот «Рози» помогал людям разбирать сломавшийся ядерный реактор.
Человек не может выполнять работу на большой глубине из-за того, что давление воды погубит человека, ведь на глубине свыше 2-х километров давление воды может раздавить даже корпус подводной лодки. Поэтому для подводных работ роботов делают из титана и других сверхпрочных материалов. Подводные роботы, такие как «Супер-Ахиллес» и «Зевс» обследуют обломки затонувших кораблей и самолетов, отыскивают и поднимают на поверхность «черные» ящики, ценные вещи и изучают подводный мир.
Для обнаружения и обезвреживания взрывчатки существуют роботы-саперы, оборудованные специальными видеоустройствами. Такие роботы передают изображение взрывных устройств человеку, находящемуся на безопасном расстоянии. Рука робота может безопасно для находящихся вблизи взрывчатки людей захватить бомбу, переместить её в специальный контейнер, чтобы избежать взрыва.
Однако «заветной» целью исследователей является создание робота подобного человеку с развитым искусственным интеллектом. Но человек – это очень сложное существо. Человек может чувствовать, выражать эмоции, такие как радость, гнев, грусть, страх и другие. Человек обладает мощным мозгом, совершает множество движений. Поэтому машине – роботу очень сложно повторить человека, робот не может быть таким, как человек.
Ученые-исследователи всего мира работают над созданием роботов похожих на людей. Например, есть робот – партнёр для танцев, который реагирует на перемещения человека и копирует движения тела и рук человека.
«АСИМО» стал первым человекоподобным роботом. Он может свободно ходить, огибать углы, подниматься и спускаться по лестнице. Главный секрет этого робота – в рюкзаке за спиной, в котором находятся мощные компьютеры, управляющие роботом. «АСИМО» умеет реагировать на голосовые команды, танцевать, узнавать человеческие лица, бить по футбольному мячу и бегать по кругу.
Устройство роботов и основные принципы работы
Строение современных роботов
Роботов производят во всем мире. Они могут быть совершенно не похожи на людей, а может быть и наоборот. Тем не менее, многие не имеют ни малейшего представления о том, как и из чего их делают и с какими проблемами сталкиваются инженеры и как их преодолеть. Устройство роботов можно сравнить со строением человека.
На самом базовом (физическом) уровне люди состоят из основных компонентов:
структура тела;
система мышц, которая движет телом;
система органов чувств, которая получает информацию о теле и окружающей среде;
источник энергии, питающий мышцы и органы чувств;
мозговая система, которая обрабатывает информацию от органов чувств и дающая указания мышцам.
Роботы делаются из аналогичных компонентов. Обычный робот обладает подвижной физической структурой, электродвигателем определенного рода, системой сенсоров (датчиков, органов чувств), блоком питания и компьютерным «мозгом», который контролирует все эти элементы. По существу, роботы — это техногенные версии животной жизни. Это машины, которые копируют поведение людей и животных.
Большинство робототехников (людей, которые делают роботов) указывают, что роботы обладают программируемым мозгом (компьютером), который движет тело.
Согласно этому определению, роботы отличаются от других подвижных машин вроде автомобилей, поскольку у них есть компьютерный элемент. Роботы отличаются от обычных компьютеров по своей физической природе — у обычных компьютеров нет физического тела, они могут существовать и без него.
У подавляющего большинства роботов действительно есть общие черты. Прежде всего, почти у всех роботов есть подвижное тело. Некоторые обладают только моторизованными колесами, у других есть десятки подвижных сегментов, как правило, из металла или пластика.
Чтобы управлять различными приводами и системами робот нуждается в источнике питания. Большинство роботов либо оснащены батареей, либо работают от розетки. Все приводы подключаются к электрической цепи. Компьютер робота управляет всем, что подключено к цепи. Чтобы передвигать робота, компьютер активирует все необходимые двигатели и клапаны. Большинство роботов можно перепрограммировать, чтобы изменить поведение — достаточно просто ввести новую программу в компьютер.
Не у всех роботов есть система сенсоров, и лишь некоторые обладают способностью видеть, слышать, чувствовать запах или вкус. Самая распространенная способность робота — способность ходить и наблюдать за своим перемещением. Светодиод на одной стороне колеса пускает луч света через щель, чтобы подсветить датчик света на другой стороне колеса. Когда робот движет определенным суставом, колесо с щелью крутится. Щель разбивает луч света по мере вращения колеса. Световой датчик считывает поведение светового луча и передает данные на компьютер. Компьютер точно может сказать, как вращается сустав в определенной модели. По тому же принципу работает компьютерная мышь.
Это основы робототехники. Робототехники могут комбинировать эти элементы в бесконечное число способов создания роботов неограниченной сложности.
Разработка модели робота EV3
Для практического ознакомления с конструкцией и принципами работы роботов я принял решение создать модель Lego-робота с сенсорными датчиками и возможностью передвижения в пространстве. Lego-робот помогает понять основы робототехники, наглядно реализовать сложные алгоритмы, рассмотреть вопросы, связанные с автоматизацией различных процессов.
В качестве платформы для создания робота я использовал конструктор Lego Mindstorms EV3. Для создания программы, по которой будет действовать модель, используется специальный графический язык программирования.
Серия LEGO Mindstorms была впервые представлена в 1998 году. Через 8 лет (в 2006) на свет появился набор LEGO Mindstorms NXT 1.0, а уже в 2009 — набор LEGO Mindstorms NXT 2.0. LEGO Mindstorms EV3 – последнее (третье) поколение конструктора, который был представлен почти год назад, 4 января 2013 года [5].
Программируемый блок – это мозг и голос робота… EV3, он же интеллектуальный блок и сердце системы, он же «кирпичик» или «кубик» в конструкторе. Служит центром управления и энергетической станцией робота и имеет следующие функциональные элементы:

Рисунок 5 – Программируемый блок EV3
– Многофункциональный монохромный дисплей
– Шестикнопочный интерфейс управления с функцией изменения подсветки (3 цвета) для индикации режима работы
– 4 порта ввода (1, 2, 3, 4) для подключения датчиков
– 4 порта вывода (A, B, C, D) для выполнения команд
– 1 разъём mini USB для подключения EV3 к компьютеру
– 1 порт USB–хост (для соединения нескольких EV3 в одну цепь, например)
– 1 слот для карт памяти формата microSD (до 32Гб) – для увеличения объёма доступной памяти EV3
– Встроенный динамик
Кубик EV3 также поддерживает Bluetooth, WiFi для связи с компьютерами.
Большой EV3-сервомотор имеет встроенный датчик вращения с точностью измерений до 1 градуса. Используя этот датчик, мотор может соединяться другими моторами, позволяя роботу двигаться с постоянной скоростью. Кроме того, датчик вращения может использоваться и при проведении различных экспериментов для точного считывания данных о расстоянии и скорости. Средний EV3-сервомотор. Идеален для задач, когда скорость и быстрота отклика, а также размер робота важнее его грузоподъёмности.

Рисунок 6 – Большой (слева) и средний (справа) сервомоторы
Датчик касания (EV3) — позволяет роботу реагировать на касания, распознает три ситуации: прикосновение, щелчок и освобождение.

Рисунок 7 – Датчик касания (слева) и цифровой ИК-датчик (справа)
Цифровой ИК-датчик (EV3). Для определения приближения робота. Также способен улавливать ИК-сигналы от ИК-маяка, позволяя создавать дистанционно управляемых роботов, навигационные системы для преодоления препятствий.
– Измерения приближения или удаления в радиусе 50-70 см
– Радиус улавливания ИК-сигналов до 2 метров
– До 4 индивидуальных каналов приёма сигнала
– Получение удаленных ИК-команд управления
Процесс сборки робота оказался не таким увлекательным, как, например, сборка моделей LEGO Technics, так как в данной модели робота лишь крупные детали, среди которых были множество датчиков. Запрограммировали собранного робота с помощью компьютера. В результате собрана модель, которая может самостоятельно двигаться: вперёд-назад, поворот, разворот на месте, определять кубик (объект), захватывать его и перемещать объект в заданное место (перевозить груз).
В результате данной работы:
— собрана модель робота EV3;
— используя графический язык программирования разработана программа, использующая основные алгоритмические структуры: линейную, цикл;
— получены знания и умения о настройке команд и практическом использовании датчиков.
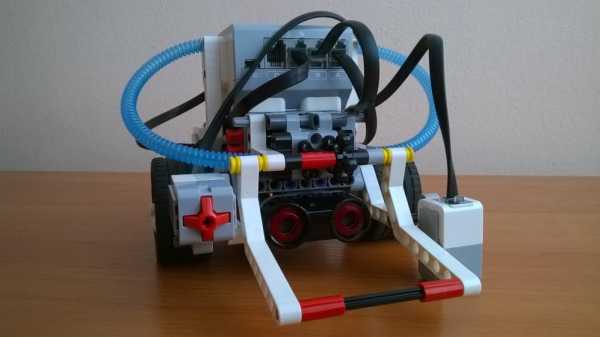
Рисунок 8 – Собранная модель робота EV3
2.3. Результаты анкетирования одноклассников
В процессе научно-исследовательской работы я предложил одноклассникам ответить на несколько вопросов по теме «Роботы» (приложение 1). В анкетировании участвовали 25 человек. Целью анкетирования было определения знаний ребят о роботах и робототехнике.
По результатам анкетирования выяснилось: абсолютно все одноклассники знают, что в жизни нас окружают роботы, они нужны людям и могут выполнять вместо людей различную работу. Однако ребята знают только о роботах — помощниках в быту и производстве. На вопрос, какие роботы есть в вашей жизни, большинство ответили о наличии игрушек на пульте управления, домашней техники (микроволновка, стиральная машина и т.д.). Кроме того, все ребята указали на основную составляющую роботов – наличие программ и датчиков.
24 человека из опрошенных считают, что основное предназначение роботов – это помощь людям и только 1 человек указал, что роботы призваны защищать людей.
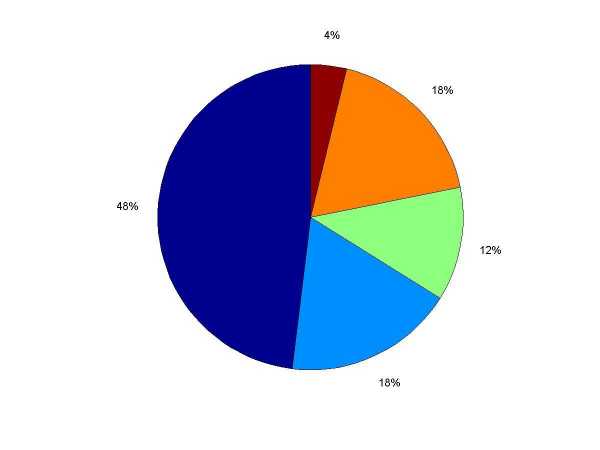
Значительно разделились мнения ребят в объяснении своей позиции при ответе на вопрос: «Может ли робот заменить человека?»
Может ли робот заменить человека?
Рисунок 9 – Результаты анкетирования учащихся
Действительно, если рассуждать: может ли робот заменить человека при выполнении определенной работы, то логичен ответ – «Да» — робот может заменить человека. А если рассуждать с точки зрения: может ли робот заменить человека как живое существо, тогда ответ будет – «Нет», потому что человек — сложный живой организм, обладающий разумом, способный испытывать различные чувства: любовь, радость, грусть, ответственность и т.д.
ЗАКЛЮЧЕНИЕ
В настоящее время благодаря стремительному развитию вычислительной техники и, как следствие, заметному росту «интеллектуальных» возможностей роботов произошло их внедрение во многие сферы человеческой деятельности. Роботы побывали в таких местах, куда не может попасть ни один человек, выполнили сложнейшие задания, которые не под силу выполнить человеку, и изменили жизнь многих людей. И это только начало! В самом ближайшем будущем появятся новые, еще более удивительные роботы!
Анкетирование одноклассников показало, что мы ежедневно сталкиваемся с разнообразными вариантами робототехники, однако не задумываемся о значении роботов и их устройстве.
В результате написания научно-исследовательской работы стало очевидно, что умные машины нужны повсюду. Они приносят много пользы, сплошь и рядом они готовы заменить человека. Ведь наши физические возможности ограничены, а умная машина — робот — со многими задачами справляется лучше человека.
Я пришел к выводу, что человек не может обходиться без роботов. Но робот может заменить человека только при выполнении какой-нибудь работы или действия. Чувствовать как человек и быть таким же разумным существом, как человек, робот не может.
Возможно, что в будущем появятся такие роботы, которые внешне будут очень привлекательны — похожи на людей и будут ежедневно приносить огромную пользу людям.
Список использованных источников информации
История робототехники [Электронный ресурс] — [http://titok007.narod.ru/history.html]
Образовательная робототехника [Электронный ресурс] — http://eldron.ru/catalog/robototekhnika/datchiki_lego/
Откуда произошло слово РОБОТ? [Электронный ресурс] — http://masterok.livejournal.com/1449280.html
Хромов Д.В. Разновидности роботов и их классификация
[Электронный ресурс] — http://www.scienceforum.ru/2013/
http://geektimes.ru/company/ulmart/blog/242809/
Приложения
Приложение 1
Вопросы для анкетирования учащихся на тему «Роботы»
Окружают ли вас в жизни роботы?
(подчеркните или обведите ваш вариант ответа):
— да,
— нет
Для чего нужны роботы?
— чтобы помогать людям,
— чтобы навредить людям,
— чтобы защищать людей,
__________________________________________________________________________________________________________________________________________________________
(свой вариант ответа)
Может ли робот выполнять работу вместо человека?
— может,
— не может
Может ли человек обойтись без роботов?
— может,
— не может
Может ли робот заменить человека?
— может,
— не может
Объясните почему____________________________________________________________
__________________________________________________________________________________________________________________________________________________________
Какие роботы есть в вашей жизни?
(напишите) _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Из чего состоят роботы? Как Вы считаете?
_______________________________________________________________________________________________________________________________________________________________________________________________________________________________________
multiurok.ru
Исследовательский проект «Робототехника» — технология (мальчики), прочее
ПРОЕКТ РОБОТОТЕХНИКА
1.Введение
Роботы сегодня вошли в нашу жизнь в разных областях. Они летают в космос, исследуют другие планеты; помогают в военных целях — разминируют бомбы и разведывают обстановку с воздуха. В промышленности многие области уже немыслимы без роботов: они собирают автомобили, помогают находить новые лекарства.
Я занимаюсь в кружке Рободелкин. Робототехника — это мое серьезное увлечение, и я решил посвятить свой исследовательский проект именно этой теме. Моя цель: доказать, что робототехника может быть не просто игрой, а серьезным занятием, которое может в дальнейшем стать профессией.
Мои задачи:
Изучить историю роботов
Узнать, где может пригодиться робототехника.
Провести анкетирование, чтобы выяснить насколько популярной является робототехника, среди ребят моего возраста.
Собрать и спрограммировать подвижного робота из конструктора Lego Mindstorms.
Формулировка выводов.
2.История возникновения термина «Робот и Робототехника».
Практически каждое изобретение человека находит отражение в искусстве. С роботами же вышло наоборот: произведения многих фантастов вдохновляли ученых на работу над робототехникой.
А началась «эра» роботов в искусстве в январе 1921 года, когда в Праге состоялась премьера новой пьесы драматурга Карела Чапека. Роботы R.U.R. сначала во всем помогают людям, а затем захватывают контроль над человечеством.
Кстати, именно Чапек ввел в нашу речь слово «робот» — немного измененное чешское «robota», что переводится как принудительный труд.
R.U.R. (сокращение от чеш. «Россумские универсальные роботы»)
Роботы – это механические помощники человека, способные выполнять операции по заложенной в них программе и реагировать на окружение.
Понятие «робототехника» принадлежит Айзеку Азимову, впервые оно фигурирует в его рассказе «Лжец» 1941 года. Робототе́хника (от робот и техника; англ. robotics) — прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Основные законы робототехники:
• Робот не может причинить вред человеку. • Робот должен подчиняться командам человека. • Робот должен заботиться о своей безопасности.
3.История развития робототехники
Робототехника наука о процессе разработки автоматизированных технических систем на базе электроники, механики и программирования. Первый чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года
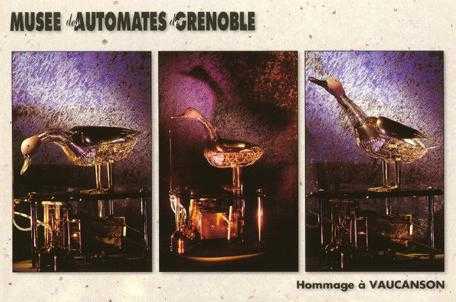
Французский механик и изобретатель Жак де Вокансон в 1738 создал механическую утку, покрытую настоящими перьями, которая могла ходить, двигать крыльями, крякать, пить воду, клевать зерно.

Швейцарский часовщик Пьер-Жак Дро в 1770г создал автомат писец. Это сидящая за столом девочка, которая выписывала аккуратным почерком буквы, слова и даже могла нарисовать собаку. При этом она плавно покачивала головой и опускала веки в такт движения руки.

Не остались в стороне и русские механики. Иван Петрович Кулибин в 1769г построил в течении трех лет яичную фигуру – универсальные часы. Часы давали театрализованное представление и играли музыку.

4.Робототехника современности
Современная робототехника основана на компьютерных технологиях. Промышленные роботы составляют больше 80% от всех существующих на сегодня устройств. Они способны практически полностью заменить человека на многих заводах: механические «рабочие» не допускают ошибок, не устают, им не нужно платить зарплату.
В 1966 году появился робот Шеки (англ. Shakey) — первый универсальный мобильный робот, способный рассуждать над своими действиями.

Без робота Dante II человек никогда бы не заглянул в кратер действующего вулкана.

Без робота Sojourner(Соджорнер-марсохрд) наши знания о Марсе были бы намного более скудными. Этот агрегат в 1997 году высадился на поверхность планеты и передал на Землю огромное количество фотоснимков.
Домашние роботы не приспособлены к экстремальным условиям. Их задача — помочь человеку в быту и развлечь его. Существует огромное количество недорогих домашних роботов: роботы-пылесосы, роботы-газонокосильщики.
Робот PaPeRo компании NEC, помимо чисто бытовых функций, умеет говорить. Этот робот знает более 300 фраз, а распознает и того больше.
Но больше всех умеет разработка компании Sony — собачка Aibo (яп. 愛慕 айбо означает «любовь»). Она способна узнавать своего хозяина, реагировать на команды, ласку. Aibo имеет четыре стадии взросления: младенчество, детство, юность и зрелый возраст. Собачка умеет бегать, прыгать, потягиваться, играть в футбол и танцевать.

5. Части роботов.
Корпус большинства роботов состоит из отдельных подвижных и неподвижных частей. Вот основные из них:
Внутренний контроллер
Каждый робот оснащен контроллером — компьютерной операционной системой. Контроллер — это мозг любого робота. Он содержит всю необходимую информацию для выполнения задач и указаний.
Источник энергии
Роботам необходим источник энергии. Одни работают от батарей. Другие оснащены фотоэлементами, которые преобразуют солнечный свет в энергию. Механические роботы заводятся с помощью пружинного механизма.
Дистанционное управление
Роботы, которые работают на других планетах, такие как марсоход, оборудованы внутренними контроллерами, но ими также можно управлять с Земли. По снимкам оператор определяет, куда должен двигаться робот и какую задачу ему нужно выполнить.
Сенсоры света и звука
С их помощью робот может распознавать свет, исходящий от объектов, определять звуковые волны. Эта функция помогает либо обходить различные предметы, либо идти к ним навстречу. Также в корпус робота может быть встроено устройство распознавания голоса, с помощью которого человек отдает машине устные приказы.
Датчики давления
Некоторые роботы оборудованы датчиками давления, которые имитируют осязание. У этих сенсоров, как правило, два назначения. Они сообщают роботу о том, что он ударился о какой-нибудь предмет и должен сменить направление движения, а также позволяют правильно захватить и поднять объект.
6.Результаты анкетирования одноклассников Я решил провести в нашем классе анкетирование. В анкете один вопрос: «Чем ты любишь заниматься в свободное время?»
И пять вариантов ответа:
——- гулять с друзьями
——-читать
——-смотреть ТВ
——-играть в конструктор ЛЕГО
——-заниматься спортом
Из этого опроса я вижу, что ребятам нравится играть в конструктор, и они знакомы с конструктором Лего, и многих бы заинтересовал такой школьный предмет, как «Робототехника».
7.Практическая часть.
Существует много видов конструкторов, но самым популярным и уникальным является Лего. С этим конструктором знакомы, я думаю все. Уникальный он, потому что все его детали подходят друг к другу и можно соединять несколько наборов.
На занятиях по робототехнике мы работаем с конструктором Lego Mindstorms EV3, это самая последняя модель обучающего конструктора фирмы ЛЕГО.
Робот, движущийся по линии.
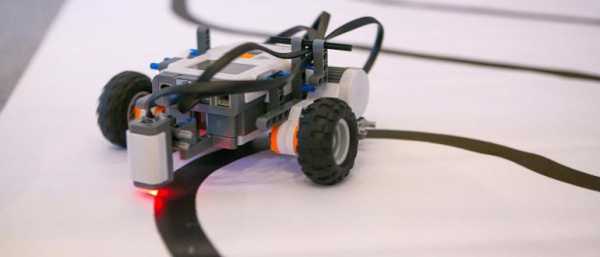
Несмотря на кажущуюся простоту поставленной задачи, сделать робота, который сможет пройти маршрут лучше и быстрее других не так-то и просто. В процессе прохождения маршрута робот может потерять линию и нужен алгоритм, позволяющий ему вернуться на маршрут и продолжить прохождение.

Занятие робототехникой развивает навыки информатики, математики, технологии, физики, умение объемно видеть предмет и творческие способности.
Во многих школах уже появляется данное направление, как дополнительные занятия, но я считаю такой предмет нужно ввести в каждой школе, он очень полезен, ведь за инженерами, программистами, технологами — будущее нашей страны.
8. Заключение.
В наши дни робототехника применяется абсолютно во всех областях и профессиях: в промышленности, в медицине, на войне и даже в космосе, роботы помогают нам по дому, а возможно в будущем и заменят многие профессии человека вообще.
В ходе моих исследований, я хотел показать, что изготовление робота очень интересный, увлекательный и познавательный процесс. Над созданием роботов трудятся настоящие ученые и инженеры, но каждый школьник может придумать дизайн одного из них.
Как сказал Председатель Правительства РФ Дмитрий Медведев: «Уже в школе дети должны получить возможность раскрыть свои способности, подготовиться к жизни в высокотехнологичном конкурентном мире».
Я очень хочу, чтобы мое увлечение стало моей профессией, но если я не стану конструктором, я знаю, что навыки, приобретенные при занятиях робототехникой, пригодятся мне в дальнейшем и в учебе, и в работе.
9. Список литературы
1.Макаров И. М., Топчеев Ю. И. Робототехника: История и перспективы. — М.: Наука; Изд-во МАИ, 2003.
2.Детская энциклопедия. Техника будущего., М; изд.Литера, 2007 г.
Интернет ресурсы:
1.http://roboreview.ru/nauka-o-robotah/istoriya-razvitiya-robototehniki.html — история развития робототехники
2.http://robot-ex.ru/ru/newscontent/razvitie-robototehniki-v-budushchem — развитие робототехники в будущем
[Введите текст]
kopilkaurokov.ru
Исследовательский проект «Робототехника» — технология (мальчики), прочее
ПРОЕКТ РОБОТОТЕХНИКА
1.Введение
Роботы сегодня вошли в нашу жизнь в разных областях. Они летают в космос, исследуют другие планеты; помогают в военных целях — разминируют бомбы и разведывают обстановку с воздуха. В промышленности многие области уже немыслимы без роботов: они собирают автомобили, помогают находить новые лекарства.
Я занимаюсь в кружке Рободелкин. Робототехника — это мое серьезное увлечение, и я решил посвятить свой исследовательский проект именно этой теме. Моя цель: доказать, что робототехника может быть не просто игрой, а серьезным занятием, которое может в дальнейшем стать профессией.
Мои задачи:
Изучить историю роботов
Узнать, где может пригодиться робототехника.
Провести анкетирование, чтобы выяснить насколько популярной является робототехника, среди ребят моего возраста.
Собрать и спрограммировать подвижного робота из конструктора Lego Mindstorms.
Формулировка выводов.
2.История возникновения термина «Робот и Робототехника».
Практически каждое изобретение человека находит отражение в искусстве. С роботами же вышло наоборот: произведения многих фантастов вдохновляли ученых на работу над робототехникой.
А началась «эра» роботов в искусстве в январе 1921 года, когда в Праге состоялась премьера новой пьесы драматурга Карела Чапека. Роботы R.U.R. сначала во всем помогают людям, а затем захватывают контроль над человечеством.
Кстати, именно Чапек ввел в нашу речь слово «робот» — немного измененное чешское «robota», что переводится как принудительный труд.
R.U.R. (сокращение от чеш. «Россумские универсальные роботы»)
Роботы – это механические помощники человека, способные выполнять операции по заложенной в них программе и реагировать на окружение.
Понятие «робототехника» принадлежит Айзеку Азимову, впервые оно фигурирует в его рассказе «Лжец» 1941 года. Робототе́хника (от робот и техника; англ. robotics) — прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Основные законы робототехники:
• Робот не может причинить вред человеку. • Робот должен подчиняться командам человека. • Робот должен заботиться о своей безопасности.
3.История развития робототехники
Робототехника наука о процессе разработки автоматизированных технических систем на базе электроники, механики и программирования. Первый чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года
Французский механик и изобретатель Жак де Вокансон в 1738 создал механическую утку, покрытую настоящими перьями, которая могла ходить, двигать крыльями, крякать, пить воду, клевать зерно.
Швейцарский часовщик Пьер-Жак Дро в 1770г создал автомат писец. Это сидящая за столом девочка, которая выписывала аккуратным почерком буквы, слова и даже могла нарисовать собаку. При этом она плавно покачивала головой и опускала веки в такт движения руки.
Не остались в стороне и русские механики. Иван Петрович Кулибин в 1769г построил в течении трех лет яичную фигуру – универсальные часы. Часы давали театрализованное представление и играли музыку.
4.Робототехника современности
Современная робототехника основана на компьютерных технологиях. Промышленные роботы составляют больше 80% от всех существующих на сегодня устройств. Они способны практически полностью заменить человека на многих заводах: механические «рабочие» не допускают ошибок, не устают, им не нужно платить зарплату.
В 1966 году появился робот Шеки (англ. Shakey) — первый универсальный мобильный робот, способный рассуждать над своими действиями.
Без робота Dante II человек никогда бы не заглянул в кратер действующего вулкана.
Без робота Sojourner(Соджорнер-марсохрд) наши знания о Марсе были бы намного более скудными. Этот агрегат в 1997 году высадился на поверхность планеты и передал на Землю огромное количество фотоснимков.
Домашние роботы не приспособлены к экстремальным условиям. Их задача — помочь человеку в быту и развлечь его. Существует огромное количество недорогих домашних роботов: роботы-пылесосы, роботы-газонокосильщики.
Робот PaPeRo компании NEC, помимо чисто бытовых функций, умеет говорить. Этот робот знает более 300 фраз, а распознает и того больше.
Но больше всех умеет разработка компании Sony — собачка Aibo (яп. 愛慕 айбо означает «любовь»). Она способна узнавать своего хозяина, реагировать на команды, ласку. Aibo имеет четыре стадии взросления: младенчество, детство, юность и зрелый возраст. Собачка умеет бегать, прыгать, потягиваться, играть в футбол и танцевать.
5. Части роботов.
Корпус большинства роботов состоит из отдельных подвижных и неподвижных частей. Вот основные из них:
Внутренний контроллер
Каждый робот оснащен контроллером — компьютерной операционной системой. Контроллер — это мозг любого робота. Он содержит всю необходимую информацию для выполнения задач и указаний.
Источник энергии
Роботам необходим источник энергии. Одни работают от батарей. Другие оснащены фотоэлементами, которые преобразуют солнечный свет в энергию. Механические роботы заводятся с помощью пружинного механизма.
Дистанционное управление
Роботы, которые работают на других планетах, такие как марсоход, оборудованы внутренними контроллерами, но ими также можно управлять с Земли. По снимкам оператор определяет, куда должен двигаться робот и какую задачу ему нужно выполнить.
Сенсоры света и звука
С их помощью робот может распознавать свет, исходящий от объектов, определять звуковые волны. Эта функция помогает либо обходить различные предметы, либо идти к ним навстречу. Также в корпус робота может быть встроено устройство распознавания голоса, с помощью которого человек отдает машине устные приказы.
Датчики давления
Некоторые роботы оборудованы датчиками давления, которые имитируют осязание. У этих сенсоров, как правило, два назначения. Они сообщают роботу о том, что он ударился о какой-нибудь предмет и должен сменить направление движения, а также позволяют правильно захватить и поднять объект.
6.Результаты анкетирования одноклассников Я решил провести в нашем классе анкетирование. В анкете один вопрос: «Чем ты любишь заниматься в свободное время?»
И пять вариантов ответа:
——- гулять с друзьями
——-читать
——-смотреть ТВ
——-играть в конструктор ЛЕГО
——-заниматься спортом
Из этого опроса я вижу, что ребятам нравится играть в конструктор, и они знакомы с конструктором Лего, и многих бы заинтересовал такой школьный предмет, как «Робототехника».
7.Практическая часть.
Существует много видов конструкторов, но самым популярным и уникальным является Лего. С этим конструктором знакомы, я думаю все. Уникальный он, потому что все его детали подходят друг к другу и можно соединять несколько наборов.
На занятиях по робототехнике мы работаем с конструктором Lego Mindstorms EV3, это самая последняя модель обучающего конструктора фирмы ЛЕГО.
Робот, движущийся по линии.
Несмотря на кажущуюся простоту поставленной задачи, сделать робота, который сможет пройти маршрут лучше и быстрее других не так-то и просто. В процессе прохождения маршрута робот может потерять линию и нужен алгоритм, позволяющий ему вернуться на маршрут и продолжить прохождение.
Занятие робототехникой развивает навыки информатики, математики, технологии, физики, умение объемно видеть предмет и творческие способности.
Во многих школах уже появляется данное направление, как дополнительные занятия, но я считаю такой предмет нужно ввести в каждой школе, он очень полезен, ведь за инженерами, программистами, технологами — будущее нашей страны.
8. Заключение.
В наши дни робототехника применяется абсолютно во всех областях и профессиях: в промышленности, в медицине, на войне и даже в космосе, роботы помогают нам по дому, а возможно в будущем и заменят многие профессии человека вообще.
В ходе моих исследований, я хотел показать, что изготовление робота очень интересный, увлекательный и познавательный процесс. Над созданием роботов трудятся настоящие ученые и инженеры, но каждый школьник может придумать дизайн одного из них.
Как сказал Председатель Правительства РФ Дмитрий Медведев: «Уже в школе дети должны получить возможность раскрыть свои способности, подготовиться к жизни в высокотехнологичном конкурентном мире».
Я очень хочу, чтобы мое увлечение стало моей профессией, но если я не стану конструктором, я знаю, что навыки, приобретенные при занятиях робототехникой, пригодятся мне в дальнейшем и в учебе, и в работе.
9. Список литературы
1.Макаров И. М., Топчеев Ю. И. Робототехника: История и перспективы. — М.: Наука; Изд-во МАИ, 2003.
2.Детская энциклопедия. Техника будущего., М; изд.Литера, 2007 г.
Интернет ресурсы:
1.http://roboreview.ru/nauka-o-robotah/istoriya-razvitiya-robototehniki.html — история развития робототехники
2.http://robot-ex.ru/ru/newscontent/razvitie-robototehniki-v-budushchem — развитие робототехники в будущем
[Введите текст]
kopilkaurokov.ru
2 Проектно-исследовательская работа «Роботы в жизни учеников нашей школы»
Муниципальное бюджетное общеобразовательное учреждение«Средняя общеобразовательная школа № 16»
Роботы в нашей жизни
Ученицы 9Б класса
Дементьевой Марии Викторовны
Учитель Гришина Любовь Константиновна
г. Сергиев Посад
2015
Содержание
Введение …………………………………………………………………… 3
Глава 1. Прошлое и настоящее робототехники …………………………. 4
1.1. Популярная история роботов ……………………………….…. 4
1.2. Классификации роботов в настоящее время ……………….…. 7
1.3. Типы управления …………………………………………………. 9
Глава 2. Роботы в нашей жизни …………………………………………. 12
2.1. Роботы в ближайшем будущем ………………………………. …12
2.2. Проектно-исследовательская работа «Роботы в жизни учеников нашей школы» ……………………………………………………… …20
Заключение ………………………………………………………………. …22
Список литературы ……………………………………………………… …23
Введение
Современный мир техники привычен для нас. Мы уже мало чему удивляемся: обыденными и, кажется, несложными стали полёты в космос, к Венере, Марсу, на Луну. А ведь это плод труда больших коллективов теоретиков и экспериментаторов, учёных и конструкторов, инженеров и рабочих и многих тысяч других людей – знаменитых, известных и неизвестных.
Сегодня в мире используются миллионы роботов. Применение им нашлось практически во всех сферах человеческой деятельности. Роботы управляют самолётами и поездами, спускаются в жерла вулканов и на дно океана, помогают в строительстве космической станции, в сборке автомобилей и производстве микрочипов, охраняют здания, используются военными для разведки и разминирования, помогают спасателям искать людей под завалами. Нет такой области, в которой человек не попытался создать себе автоматического помощника.
Цель работы: рассмотреть робототехнику в жизни человека.
Задачи:
Узнать историю робототехники.
Изучить классификацию роботов.
Исследовать отношение учеников нашей школы к робототехнике.
Глава 1. Прошлое и настоящее робототехники
. Популярная история роботов
Слово «робот» прочно вошло в современный обиход, современную речь и современную жизнь. Трудно представить себе мир XXI века без «умных» машин. Они проникли всюду: от заводских сборочных цехов и медицины до арсеналов наиболее развитых армий мира. Ну и, конечно, редкий фантастический фильм или роман обходится без автономных думающих механизмов, которые известны под славяноязычным термином «робот».
Робот – от словацкого «rabota» (тяжелый труд, каторга, барщина), создан для того, чтобы заменить человека в самой изнурительной деятельности, опасных средах и ситуациях. Беспилотные самолеты-разведчики, искусственные спутники, стратосферные зонды, саперные тралы, знаменитые советские луноходы – все это роботы. Однако наиболее впечатляющая мечта человечества – человекообразная машина, воспетая фантастами и футурологами, только начинает делать свои первые робкие шаги.
Слово «робот» вышло из под пера чешского фантаста Карела Чапека, написавшего в 1920 году пьесу «Р. У. Р.» – «Россумские Универсальные Роботы», которая повествовала о фабрике, производящей искусственных людей. После того, как ее перевели на английский и поставили на Бродвее, термин робот покорил сначала Америку, а потом и весь мир.
Идея, однако, совсем не так нова, как может показаться.
Андроиды пришли к нам из древних мифов: это Галатея – статуя прекрасной женщины, оживленная ее творцом Пигмалионом; Кадм, засеявший поле зубами дракона, чтобы вырастить армию солдат; глиняный гигант Мисткальф, созданный Робот Леонардо да Винчитроллем Рунгнером для схватки с богом Тором; наконец, его прямой аналог – Голем пражского раввина Иегуда Бен Бецалеля.
Первый технический чертеж робота примерно на сто лет опередил легенду о Големе. В 1495 году Леонардо да Винчи спроектировал механического рыцаря, который, впрочем, никогда не увидел полей сражения.
Внутри доспехов находился механизм, приводящий в движение искусственного человека при помощи тросов и роликов, создавая иллюзию, что там внутри есть живой человек. Рыцарь-робот умел садиться, двигать головой и руками, анатомически правильно открывать и закрывать рот. Также, он мог имитировать звуки — шёл под сопровождение автоматических барабанов.
Лишь в XVIII столетии появились первые заводные механизмы, подражавшие живым существам. Первого действующего человекоподобного робота создал французский изобретатель Жак де Вокансон в 1737 году. Андроид представлял из себя человека в натуральную величину способного на флейте. Флейтист Вокансона имел в репертуаре 12 произведений! В конце XIX века русский изобретатель Пафнутий Чебышев представил проект «стопохода» – человекоподобной машины повышенной проходимости. Примерно тогда же другой великий славянин – серб Никола Тесла испытал радиоуправляемое судно (1898), после чего, шествие роботов по миру было уже не остановить.
Всего через четыре года после бродвейской премьеры Чапековского «Р.У.Ра» на Всемирной выставке 1927-го в Нью-Йорке инженер Д. Уэксли продемонстрировал простейшего робота, способного выполнять команды человека.
В 1950-ых с развитием ядерной промышленности в строй ввели первые манипуляторы, имитировавшие движения человеческих рук, которые применялись при работе с радиоактивными материалами.
1960 – создание первых многофункциональных самоходных платформ для сбора все тех же радиоактивных материалов, ну а к 1970-м, после окончания Лунных программ США и СССР появились аппараты для обезвреживания взрывоопасных предметов, например — сверхлёгкий мобильный робот МРК-01 МГТУ им. Баумана
1981 год ознаменовался первой жертвой робота, когда рабочий завода Кавасаки Кэндзи Уарда погиб от несчастного случая в сборочном цеху. Кстати, некоторые истории о погибших от «рук» роботов пугающе напоминают легенду о Големе, восставшем против своего творца. В 2007 году в ходе полевых испытаний автономной пушки, проводившихся вооружёнными силами ЮАР, роботизированное орудие дало сбой и принялось палить по своим. Погибло 9, и было ранено 14 солдат. В 2008 году 81-летний австралиец самостоятельно собрал робота, чтобы совершить самоубийство.
В настоящее время человекоподобные роботы «андроиды» встречаются все чаще, пока еще не в жизни, но уж точно на выставках перспективных технологий.
Двухтысячные годы ознаменовались целой серией андроидов. Aiko – канадского изобретателя с имитацией человеческих чувств: осязание, слух, речь, зрение; робот-теннисист TOPIO от вьетнамской фирмы TOSY, ASIMO – японской Хонды, и многие другие.
Цена их пока «зашкаливает», однако, первые механические слуги уже поступают в официальную продажу. Цена (от 100 000 долларов), заметная неуклюжесть и хрупкость, проблемы с «компьютерным зрением», источники питания, а главное – искусственный интеллект – вот что является препятствием для повсеместного распространения человекообразных роботов.
Но знаменитый шахматный компьютер Deep Blue («Дип Блю») уже обыграл Гарри Каспарова… А все развивающаяся индустрия электроактивных полимеров, способных имитировать движения и КПД природных мышц, обещает решить проблемы неуклюжести и заторможенности движений роботов.
Так не понадобится ли вскоре признание на международном законодательном уровне Трех Законов Робототехники, которые сформулировали еще в 1942 году американские фантасты Айзек Айзимов и Джон Кэмпебел?
Быть может тогда человечество будет застраховано от случаев, подобных тому, что произошел на испытаниях в ЮАР, а так же многочисленных мрачных прогнозов литературы и кино, начиная с «Метрополиса» Фрица Ланга (1927), повествующих о восстании машин? По крайней мере, такие вопросы ставятся на повестку дня. В Институте сингулярности (SIAI) в США исследуют проблемы глобальных рисков, которые могут возникнуть при использовании сверхчеловеческого искусственного интеллекта, не запрограммированного на безусловную лояльность человеку. Что из этого выйдет – покажет время, причем, самое недолгое.
1.2. Классификации роботов в настоящее время
Анализируя литературные источники по данной теме, в зависимости от назначения и решаемого класса задач можно рассмотреть следующую классификацию роботов:
1. Промышленные роботы предназначены для автоматизации всевозможных технологических операций (например сварка, штамповка, металлообработка, сборка готовых изделий и т.д.) на производстве какой либо продукции. Применяются практически во всех отраслях промышленности (машиностроение, приборостроение, нефтехимическая, металлургическая, атомная, автомобильная, авиационная и др.).
2. Строительные роботы позволяют аналогичным образом автоматизировать огромное количество различных операций, выполняемых в процессе ремонта помещений или строительства новых объектов. Учитывая мировые объемы строительства и неуклонный рост населения планеты Роботизация строительства сейчас весьма актуальна.
3. Сельскохозяйственные роботы предназначены для выполнения трудоемких и монотонных процессов в сельском хозяйстве. В настоящее время ведется интенсивная разработка таких роботов, и даже есть примеры их использования, например, в Японии.
4. Транспортные роботы используются, как следует из наименования для автоматического перемещения грузов, либо автономного управления различными транспортными средствами. Транспортными роботами являются самоходные тележки, автопилоты и т.д.
5. Бытовые роботы. Данный тип роботов применяется в быту и офисах. Ярким примером бытовой автоматизированной машины является набравший приличную популярность робот-пылесос. К бытовым роботам также можно отнести коммуникативных роботов, обеспечивающих эффект присутствия удаленных друг от друга людей, либо способных самостоятельно вести диалог с человеком, и, конечно, многочисленные робоигрушки, предназначенные для развлечений и образовательных в области робототехники целей. В перспективе ожидается появление и более функциональных систем, умеющих выполнять более сложные домашние обязанности такие как: мытье посуды, стирка грязного белья, приготовление пищи и т. п.
6. Боевые (военные) роботы призваны вывести вооруженные конфликты на качественно иной уровень и предназначены для минимизации непосредственного участия человека в боевых действиях с целью сокращения или исключения вовсе людских потерь, а также для работы в условиях, несовместимых с возможностями человека в военных целях. Разновидностей боевых роботов столько же, сколько и боевых задач для войсковых подразделений: беспилотные с дистанционным управлением самолеты (вертолеты) — разведчики, подводные аппараты и надводные корабли, роботы-минеры, роботы-саперы, роботы-патрульные, роботы для переноски военной амуниции. В силу сложности поставленных перед ними задач современные боевые роботы управляются оператором, но ведутся разработки полностью автономных боевых роботов с искусственным интеллектом, способным принимать решать, однако что не может не вызывать, многочисленные споры сторонников и противников данных машин на правовом поле в части определения ответственности за действия боевых роботов и их последствия.
7. Перед охранными роботами ставятся задачи по защите вверенных территорий или помещений. В простейшем случае указанные роботы выполняют патрулирование охраняемых периметров и в случае фиксации проникновения злоумышленников сигнализируют об этом дежурным операторам. В последнее время появляется тенденция к оснащению робо-охранников небоевыми видами оружия.
8. Исследовательские роботы используются для сбора всевозможных видов информации об исследуемых объектах, ее переработки и передаче оператору. Объектами могут быть самыми разнообразными: поверхности планет, подводное пространство, подземные шахты, пещеры, полости эксплуатируемых трубопроводов, зараженная местность и другие труднодоступные для человека области.
1.3. Типы управления
Существуют следующие типы управления роботами:
1. Управляемые оператором.
Роботы, управляемые оператором, не способны самостоятельно думать, принимать решения и даже производить собственные вычисления. По сути это просто дистанционно или прямо управляемые машины. К данной категории роботов можно отнести копирующие движения органов управления роботы (простые манипуляторы или роботы андроидного типа), экзоскелеты, роботы, управляемые человеком с пульта управления.
Копирующие роботы в обязательном порядке имеют задающий орган, подобный исполнительному (с масштабом по размерам и усилиям), систему передачи управляющих сигналов и сигналов обратной связи, средства отображения для оператора среды функционирования робота. В результате движение задающего органа, выполняемое оператором, копируется с заданным масштабом исполнительным органом посредством следящих систем.
Экзоскелеты — это антропоморфные конструкции, которые обычно крепятся на подвижные части тела человека, и которые копируют их движения с одновременным увеличение создаваемых усилий. В настоящее время начато активное использование экзоскелетов в медицине для реабилитации людей с травмами позвоночника и другими недугами, приводящими к потере способности самостоятельно передвигаться. Одновременно ведутся эксперименты по использованию экзоскелетов для погрузочно-разгрузочных операций, требующих больших усилий.
Роботы, управляемые с пульта управления. С подобным принципом знакомы, наверно, все — на примере радиоуправляемых игрушечных моделек. На пульте — система клавиш или рукояток и средства отображения информации. Движение роботу задается человеком с пульта управления через систему исполнительных приводов.
2. Полуавтономные.
В полуавтоматических роботах ручное управление сочетается с автоматическим. Используется, когда заранее жестко запрограммировать все нужные операции невозможно, а оснащать робота искусственным интеллектом нецелесообразно или невозможно. К полуавтоматическим относятся роботы, которые выполняют определенный запрограммированный набор действий, однако существует необходимость вмешательства оператора для сообщения ему дополнительной информации (например, с помощью целеуказания, указания требуемой последовательности действий и т. д.).
3. Автономные.
Автономные роботы – это, как следует из наименования, роботы, запрограммированные на самостоятельные действия, без участия человека. К таковым машинам можно отнести как промышленные роботы, занятые выполнением последовательности технологических операций, так и машины, обладающие полноценным искусственным интеллектом. Предельным вариантом автономных роботов являются андроиды или киборги, которые являются героями многочисленных фантастических фильмов. Очевидно, что именно этот класс машин является апогеем развития робототехники и при массовом распространении позволит полноценно взят себя все наши повседневные бытовые заботы и просто быть незаменимым помощником в любых делах.
Глава 2. Роботы в нашей жизни
2.1. Роботы в ближайшем будущем
Всё больше производственных операций будет роботизироваться. Использование программируемого производства (custom manufacturing) потребует универсальных мобильных роботов, способных не только выполнять заранее заданный набор операций на рабочем месте, но и свободно передвигаться по производственным помещениям, переносить между рабочими местами компоненты и готовые изделия и гибко реагировать на изменения в производственном процессе. Скоро такие физически простые дела как работа аптекаря или библиотекаря в книгохранилище будут отданы роботам.
Большое количество почти полностью роботизированных фабрик и заводов начнёт появляться к 2020. К 2010-2015 роботы начнут активно использовать в сельском хозяйстве. Специализированные роботы, помогающие человеку в тяжёлой физической работе (но не полностью автономные) появятся к 2015 году. Роботов на улицах наших городов мы увидим уже к 2020-2025 году. Это будут роботы-уборщики, роботы-погрузчики.
Большая часть транспорта будет автоматизированной к 2025-2030 году. Сегодняшние автомобили значительно поумнеют: сперва они будут лишь помогать водителям выполнять некоторые операции (сложная парковка, контроль за безопасностью, движение по шоссе), но потом они возьмут на себя весь процесс вождения. Чуть раньше мобильные роботы появятся в транспортной отрасли (например, погрузочные) и горнодобывающей. Мы увидим полностью автоматизированные логистические терминалы.
Хирургический робот
Роботы будут всё больше использоваться в медицине. В некоторых областях они уже могут работать более эффективно, с большей точностью и меньшей вероятностью ошибки, чем доктора люди. Скоро можно будет совместить робохирургов с технологиями диагностирования (экспертные системы уже давно используются для постановки диагнозов, анализа рентгеновских снимков и т. п.). В этой области робототехника соприкасается с телехирургией, удалёнными операциями, выполняемыми человеком по видеосвязи. К 2030 году значительная часть операций будет выполняться роботами, а первые микророботы начнут вести наблюдения над здоровьем людей внутри их тел.
Роботизация будет не совсем такой, какой её описывали фантасты. Она будет сочетаться с автоматизацией (без автономности), переносом множества видов деятельности в онлайн (как заказ билетов), поумнением нашего окружения (дома, дороги, и т. п.). Например, не будет андроида-лифтёра, нажимающего кнопки, будет умный лифт. Не будет роботов-переводчиков, как 3PO из «Звёздных войн», будут функции синхронного перевода в телефонах, карманных и носимых компьютерах.
Тем не менее, появится огромное количество автономных специализированных роботов, но выглядящих совершенно по-разному и выполняющих очень разные функции. Роботы будут передвигаться на колёсах, на двух и более ногах, ползком, прыжками и другими способами, причём не только по земле, но и по поверхности других планет. Роботы будут плавать на поверхности рек и морей и в глубинах океана, летать в воздухе (некоторые без посадки), обеспечивая связь и наблюдение за окружающей средой. Многие роботы будут способны менять свою форму и структуру в зависимости от ситуации. Программы и форма роботов смогут создаваться с помощью эволюционных алгоритмов.
Будут и похожие на человека двуногие и двурукие андроиды, универсальные помощники, созданные для взаимодействия с человеком в обычной среде, помощи ему в повседневной деятельности и любви. Первые подобные андроиды – это японский Asimo и корейский Hubo. Распространение на работе и в быту первые такие роботы получат после 2010 года.
Воздействие на экономику и общество. Робот-андроид в городе будущего
Появление роботов окажет огромное влияние на экономику. Физический труд человека станет ненужным во многих областях. Отношение людей к распространению роботов будет зависеть от политико-экономической системы. Например, международное исследование «Автоматизация и промышленные рабочие», проведённое в 15 странах с 1971 по 1979 годы, показало, что в капиталистических странах лишь 37% рабочих готовы активно поддерживать автоматизацию, а в социалистических 69% рабочих. Без активных действий, направленных на перестройку экономики и общества возможны негативные последствия. Но когда этот непростой процесс перехода будет завершён, наше общество преобразится. Практически весь физический труд будет автоматизирован. Большая часть управленческих работ низшего уровня будет выполняться компьютерными системами. Сверхдешёвый труд роботов сделает возможным увеличение расходов на переработку отходов, защиту окружающей среды, безопасность.
Самовоспроизводство и нанороботы. Погрузка ящиков – недостойное человека занятие:
Автоматизированные фабрики сегодня развиваются в сторону увеличения универсальности. Развитие производственных технологий уже к 2020-2030 годам приведёт к появлению самовоспроизводящихся систем, то есть машин, способным производить собственные копии. Первоначально это будут небольшие настольные фабрики. Это окончательно сделает роботов доступными для всех, поскольку каждая такая фабрика сможет из простых и доступных материалов создать несколько своих копий, стремительно увеличив производственные возможности человечества.
Разведывательная робомуха (будущее):
К 2020-2030 активно будут использоваться микророботы, размером в сантиметры и миллиметры. Они будут использоваться в медицине, в сельском хозяйстве (как умные сенсоры) и во многих других областях. А лет через 10 получат распространение первые нанороботы (наноботы). Нанороботы смогут выполнять строительство нужных структур из молекул и атомов, что позволит обойтись без специальной подготовки исходных материалов. Это значит, что даже отдельные нанороботы будут достаточно независимыми.
Наноробот в кровеносном сосуде (будущее)
Нанороботы произведут ещё большую революцию, чем роботы обычные, благодаря своей универсальности и размерам. Так, нанороботы не будут нуждаться в каких-то особых материалах – для производства практически чего угодно они смогут использовать даже воду (состоящую из водорода и кислорода) и воздух (содержащий азот, кислород и углерод в углекислом газе). Нанороботы смогут легко создавать любые, самые сложные и совершенные материалы и продукты с абсолютной точностью. Разумеется, они смогут создавать и свои собственные копии, так что их всегда будет достаточно, чтобы выполнить любые задачи, которые поставит перед ними человек.
Наномашины смогут не только производить, но и чинить, в том числе и клетки человеческого организма. Именно медицинские нанороботы сделают человека не просто нестареющим и неболеющим, но и практически неуязвимым. Множество невидимых нанороботов в форме «конструктивного тумана» заполнят пространство у поверхности земли, готовые по первой мысленной команде человека мгновенно преобразоваться в любой предмет.
А через какое-то время человечество может принять решение о перестройке всей нашей планеты в гигантскую наносистему. Внешне планета изменится мало, но каждая песчинка, каждая капля, каждая крупица материи будет состоять из множества нанороботов и нанокомпьютеров.
Требования к будущей робототехнике
Какие же требования современная робототехника предъявляет к человекоподобным роботам (андроидам) и какие технические задачи уже удалось решить на этом пути?
Роботы копирующие людей (андроиды), должны уметь:
Перемещаться как люди, т.е. ходить.
Распознавать предметы и явления внешнего мира, ориентироваться во внешней среде.
Поддерживать режим естественного общения с человеком, вербального и невербального.
Самостоятельно оценивать ситуацию и принимать решения (интеллект).
Обладать физическими (манипулятивными) возможностями человека и даже превосходить их.
Конструировать себе подобных. Роботы уже ходят.
Такой естественный для человека способ перемещения в пространстве как прямохождение, является с технической точки зрения не таким уж и простым действием. Искусственное воспроизводство этого процесса является настоящим скачком в робототехнике. И хотя уже сейчас есть достаточно уверенно ходящие роботы, задача создания робота, который бы ходил абсолютно аналогично человеку, пока еще остается нерешенной.
Распознавание предметов и ориентировка в пространстве.
В идеальном варианте, робот должен уметь сканировать пространство вокруг себя для построения объемной модели реальности, в которой он находится, а также распознавать отдельные объекты этой реальности. Именно такие алгоритмы (программы) отвечают за адекватное “понимание” роботом картины внешнего мира, а значит, и лежат в основе его разумного поведения. В настоящее время, принципы распознавания объектов пространства и ориентировки в нем недостаточно разработаны и представляют собой одну из актуальнейших задач в области ИИ (Искусственного Интеллекта).
Общение роботов с человеком.
Андроид — это не просто робот похожий на человека, это результат достижений целого направления в робототехнике, которое стремится создавать роботов абсолютно аналогичных человеку. Высшим достижением робототехники станет андроид, который будет практически не отличим от обычного человека.
Одним из самых принципиальных трудностей на пути к достижению этой цели является имитация естественного коммуникативного поведения человека. Ведь человек не просто разговаривает, он выражает самые разные эмоции и мысли. Научить робота понимать обращенную к нему речь и выражать определенные чувства – это пока то, что более или менее удается сделать на данном этапе. В будущем, роботы научатся понимать не только обычную речь, но и невербальные сигналы (например, жесты и мимику), смогут общаться с людьми на разные темы.
Интеллект роботов.
Интуитивно понимая термин “Интеллект” мы в то же время затруднимся ответить на вопрос что же это такое. Строго определения этого понятия нет до сих пор, видимо потому, что природа данного феномена все еще остается не раскрытой. В нашем случае, под понятием “Интеллект робота” мы будем иметь в виду его способность принимать решения в нестандартных ситуациях на основе эвристических алгоритмов анализа (оценки) этой ситуации.
Т.е., это умение робота на основе прошлого опыта (базы данных) и арсенала аналитических возможностей (алгоритмов), находить решение задач, с которыми ему не приходилось сталкиваться ранее. Такое интеллектуальное поведение роботов возможно только на основе сложных алгоритмов самообучения и творческого подхода (эвристические алгоритмы). Эти алгоритмы и являются, по сути, предметом целого направления в технике — системы искусственного интеллекта. В настоящий момент такого рода алгоритмы разрабатываются и тестируются в рамках создания экспертных систем и самообучающихся автоматов.
Физические возможности андроида.
Требование внешнего сходства андроида с человеком приводит к необходимости решения целого ряда технических задач, например, прямохождение андроида должно быть устойчивым, а его “руки” должны позволять ему перемещать грузы и манипулировать предмерами.
При этом движения андроида, скорее всего, будут оставаться не “естественными”, пока его руки и ноги будут работать на основе механических приводов и систем, которые имеют целый ряд недостатков. Принципиальным были бы решения на основе специальных синтетических материалов, которые могли бы взять на себя функцию мышц и заменить собой электрические и пневматические приводы. В настоящее время синтетические мышцы находятся на стадии разработок.
Самовоспроизводство андроидов.
Способность к самовоспроизводству является фундаментальным свойством живой материи. Все живое самовоспроизводится. Человек, как живое существо, вполне может настолько уподобить себе роботов, что сделает их самовоспроизводящимися.
Если человек сможет это сделать чисто технически, то он интегрирует эту функцию в андроидов, как только в этом появится прагматическая необходимость. Например, самовоспроизводство андроидов может быть реализовано в виде их способности произвести (или добывать) исходный материал и организовать производственный цикл по созданию блоков для построения себе подобных роботов. Для решения этой задачи они могут кооперироваться и возможно даже жертвовать собой. Исследования в области самовоспроизводства технических устройств уже стали обычным делом.
Каждый шаг на пути решения обозначенных выше задач будет все больше сближать андроида с человеком, а удешевление технологий лежащих в основе производства их компонентов сделает их самыми распространенными техническими средствами призванными улучить нашу жизнь в будущем. Думаю, что облик будущего, обрисованного фантастическими рассказами и фильмами станет нашей реальностью уже в ближайшие 20-30 лет.
Рано или поздно роботы станут неотъемлемой частью нашего быта, какой стали компьютеры и мобильные телефоны.
С одной стороны, прогресс в целом постоянно ускоряется, но при этом темпы развития потребительской и коммерческой робототехники, пожалуй, несколько снизились. Даже ведущие мировые компании, производящие роботов на коммерческой основе, замораживают часть своих проектов. Уровень развития роботов напрямую зависит от совершенства таких областей, как, например, распознавание человеческой речи или искусственный интеллект, а в них никаких значительных подвижек не было уже несколько лет. Пока специалисты, занимающиеся исследованиями в этой сфере, не найдут новую парадигму, роботы так и не научатся совершать сложные комплексные действия. А вот принести тапочки или пропылесосить комнату — вполне в их силах. Собственно, роботы-пылесосы уже сейчас очень популярны. Так, что за робототехникой будущее, но до него еще несколько десятилетий.
2.2. Проектно-исследовательская работа «Роботы в жизни учеников нашей школы»
Выбор этой темы не случаен, так как в эпоху бурного развития информационных технологий роботы начинают восприниматься как неотъемлемая часть нашей жизни. Большинство современных ученых увлечены созданием различных типов роботов, а дети в свою очередь заинтересованы в их использовании.
Тема исследования: Робототехника
Задачи:
—выяснить, насколько важны роботы в жизни человека;
-узнать, как глубоко осведомлены дети о роботах.
Для реализации цели проектно-исследовательской работы я ознакомилась с имеющимся материалом по данной теме, провела анкетирование среди учащихся нашей школы.
Первый вопрос:
Используете ли вы роботов в своей жизни?
По результатам анкетирования я выяснила, что только 25% опрошенных учащихся, используют роботов в своей жизни.
Проанализировав второй и третий вопрос анкеты, я получила следующие данные
Второй вопрос:
Какие типы роботов вы знаете?
Третий вопрос:
Какого робота вы хотели бы приобрести?
Выводы по результатам исследования
В результате исследования я выяснила, что у большинства учащихся нет возможности обзавестись роботами, но есть желание приобрести их.
Данное исследование выявило то, что учащиеся нашей школы достаточно осведомлены о различных типах роботов. У них есть большое желание познакомиться поближе с роботами.
Заключение
Наиболее популярная ниша роботостроения – домашнее хозяйство. Разработчики пытаются создать идеальных помощников по дому. И в некотором роде им это удается. Корейская разработка Mahru-Z может самостоятельно загружать стиральную машину, подогревать и приносить пищу, убираться и тому подобное. Специальные моющие роботы могут без труда помыть пол, смести и вынести весь мусор. Все разрабатываемые человеком механизмы призваны, в первую очередь, существенно облегчить его жизнь. В медицинской сфере идет активная разработка микророботов, которые в последующем могут быть погружены в организм человека для проведения лечения.
В Японии уже активно используются прототипы людей для работы в больницах медработниками. Предполагается, что в скором будущем они даже смогут поднимать и переносить больных. Сегодня роботы данного типа могут распознавать лица и хорошо реагируют на голос. Предполагается, что различные механизмы станут незаменимыми помощниками в исследованиях фауны.
Современная робот-рыба японского производства ведет незаметное наблюдение за стаями рыб. Данное устройство было разработано на основе использования специальной системы балластов для погружения и всплытия. Хвостовая часть используется для запуска движения. В отельном бизнесе также планируется использование роботов в качестве обслуживающего персонала. Возможно, совсем скоро приобретет тестируемых роботов данного направления отель amarilis прага всегда была необычным и захватывающим городом чудес. Сегодня ученные всего мира пытаются заставить робота распознавать запахи.
Мир робототехники просто огромен, но от этого не менее интересен. Человечеству предстоит еще немало открытий в данной области и возможно когда-то роботы станут полноценной частью человеческого общества.
Список литературы
Брага Н. Создание роботов в домашних условиях — М.: НТ Пресс, 2007.
Гололобов В. Н. С чего начинаются роботы? — М.: Москва, 2011.
Корендясев А.И. Теоретические основы робототехники. — М.: Наука, 2006.
http://androbots.ru/istoriya_robototehniki/istoriya_sozdaniy
http://autowelding.ru/index/promyshlennye_roboty/0-6
http://fresher.ru/2010/03/30/sovremennye-roboty/
http://inosmi.ru/world/20141216/224967385.html
http://rus-robot.com/
http://scienceforum.ru/2013/15/5554
http://shkolazhizni.ru/archive/0/n-43108/
ist.na5bal.ru
Проект по робототехнике
Проектно-исследовательская работа
«Создание робота на основе конструктора LEGO Mindstorms EV3»
Неклюдовой Юлии Сергеевны,
ученицы 7 класса МОУ Бряндинской СШ
Научный руководитель: Таралина Валентина Витальевна,
учитель информатики первой категории МОУ Бряндинской СШ
Содержание
Введение
Обзор истории робототехники…………………………………………3
Современные рабочие роботы и функции, которые они выполняют.5
Виды робототехнических конструкторов……………………………..6
Методы исследования……………………………………………………8
Выводы……………………………………………………………………11
Список литературы…………………………………………………………….13
Введение
На протяжении многих веков люди изобретают механизмы и машины, способные облегчить нашу жизнь, и современный человек едва ли сможет представить свою жизнь без них. Ежедневно появляются новые устройства и улучшаются существующие. Таких устройств уже несчетное множество, но, безусловно, самым высоким достижением человеческой мысли являются роботы.
Робототехника — прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Лего-робототехника — это проектирование и конструирование всевозможных интеллектуальных механизмов – лего-роботов, имеющих модульную структуру и обладающих мощными микропроцессорами.
Таким образом, актуальность данной работы обусловлена необходимостью создания робота своими руками. Противоречие между желанием создать робота своими руками, с одной стороны, и отсутствием необходимых для этого знаний и умений, с другой стороны, определили проблему: возможно ли создание робота в домашних условиях. Все вышеизложенное и побудило выбрать тему проекта: «Создание робота на основе конструктора LEGO Mindstorms EV3».
Целью данной работы является создание робота на основе конструктора LEGO Mindstorms EV3.
Объектом является конструктор LEGO Mindstorms EV3.
Предметом является принцип строения и работы робота на основе конструктора LEGO Mindstorms EV3.
В основу данной работы положена гипотеза, согласно которой, изучив принцип строения и работы робота на основе конструктора Mindstorms EV3, можно создать робота самостоятельно.
В соответствии с целью и гипотезой были поставлены следующие задачи:
изучить историю робототехники;
исследовать виды современных рабочих роботов и функции, которые они выполняют;
исследовать виды робототехнических конструкторов;
изучить принцип строения и работы робота на основе конструктора Mindstorms EV3 и среду его программирования;
создать робот на основе конструктора Mindstorms EV3.
С целью достижения поставленных задач нами был разработан комплекс взаимосвязанных методов, включающий:
анализ литературы и материалов сети Internet;
моделирование.
Обзор истории робототехники
Робототехника – это область науки и техники, связанная с созданием, исследованием и применением роботов.
Робот – это машина, которая воспринимает, мыслит и действует. При этом робот может, как иметь связь с человеком (получать от него команды), так и действовать автономно.
История робототехники неразрывно связана с большинством изобретений, сделанных человечеством. Практически невозможно отделить ее от истории развития науки, техники и тем более от истории возникновения и становления компьютерных технологий.
Еще с древних времен человек хотел создать такие механизмы, которые могли бы выполнять вместо людей тяжелую и вредную работу. Однако первые успехи в этом направлении появились только в середине 18 века.
Тогда популярность набирали домашние механические куклы, представленные в 1738 году французским ученым из Гренобля (город на юго-востоке Франции) Жаком де Викансон. Он представил публике искусственного музыканта, который мог исполнять на флейте 12 различных мелодий. Немного позже к флейте добавились барабан и бубен, таким образом, был создан целый механический.
Но де Викансон на том не остановился. За оркестром последовало действительно удивительное по тем временам изобретение – механическая утка .Она могла самостоятельно передвигаться, махать крыльями, крякать, вращать головой, есть и переваривать пищу. Утка не была игрушкой в обычном понимании этого слова: в каждом ее крыле было около 400 подвижных деталей. К сожалению, никто не знает, что случилось с оригиналом утки. Однако, в музее в Гренобле есть копия утки, созданная часовщиком .
Сегодняшняя робототехника сформировалась в 60-х годах 20 века. Изобретатели вложили много сил в разработку роботов-манипуляторов, но одним из самых важных изобретений стал робот Unimate (Юнимейт), созданный Джорджом Диро и Джозефом Энжилберг. Это был один из первых промышленных роботов, и представлял собой огромную конструкцию, похожую на человеческую руку .Приспособление могло складывать части горячего литого металла и сваривать части кузова. Робот был куплен и установлен на сборочном конвейере компании General Motors, чтобы уменьшить вероятность получения травм и смертей на производстве. В настоящее время Unimate находится в Зале славы (Питсбург, США).
В 1966 году был создан робот Shakey (шейки), который, по сути, был первым роботом, способным рассуждать.
Современные рабочие роботы и функции, которые они выполняют
Современная робототехника полностью основана на компьютерных технологиях: без компьютеров роботы не смогли бы и десятой части того, что они могут. Сегодня роботов можно условно разделить на две категории: рабочие (т. е. роботы, сконструированные для служебных задач) и домашние.
Рассмотрим несколько видов рабочих роботов.
Промышленный робот – устройство (машина) с программным или дистанционным (с пульта) управлением, предназначенное для замены человека в производственных процессах. Промышленные роботы имеют перед человеком преимущество в скорости и точности реализации однообразных операций, они способны производить движения, какие человек физически выполнить не может. Применение современных промышленных роботов увеличивает производительность оборудования и выпуск продукции, улучшает качество продукции, помогает экономить материалы и энергию.
Роботы-манипуляторы широко применяются в промышленности для автоматизации многих технологических процессов при конвейерной сборке различных изделий (от автомобилей до микросхем), сварке, окраске, сверлении, перемещении тяжёлых грузов и т.д. Особое значение имеет применение роботов-манипуляторов при работе с вредными химическими веществами, при обезвреживании взрывных устройств, в кузнечных и литейных цехах, на цементных заводах, в помещениях с повышенным уровнем радиации, в условиях относительной недоступности (в морских глубинах, на космических аппаратах и орбитальных станциях) и т.д. .
Медицинские роботы призваны автоматизировать труд врача и здравоохранения в целом. Работа в этой области помогла создать два уникальных направления в медицине. Первое направление — это телехирургия: хирург руководит роботом во время операции, непосредственно не контактируя с пациентом. Второе направление – это хирургия с минимальным вмешательством . Отдельное направление – это медицинские тренажеры – оборудование для профессиональной подготовки специалистов, призванное облегчить отработку практических навыков без риска для пациентов. Медицинские тренажеры имитируют функциональные или физические модели организма человека. С помощью тренажеров можно создавать подобие экстремальной обстановки. Есть возможность остановить процесс в любой момент, обсудить ситуацию, проанализировать действия. При многократной работе с тренажерами формируются необходимые навыки .
Использование медицинских роботов повышает уровень автоматизации и облегчает труд врачей, уменьшает вероятности врачебных ошибок, ускоряет процессов возвращения пациентов к нормальному существованию после травм и заболеваний.
Виды робототехнических конструкторов
Можно ли создать робота самостоятельно? Что представляют из себя конструкторы для самостоятельной сборки и программирования роботов? Что это, очередные игрушки или все-таки средства, с помощью которых можно создать робота? Попробуем разобраться.
Моделирование – это построение и изучение моделей реально существующих объектов, предназначенных для изучения процессов или явлений с целью получения объяснений этих процессов или явлений. Цель моделирования – проверка гипотезы и тестирование программного обеспечения
Мы живём в век стремительного развития робототехники и уже сегодня можно найти в магазинах множество наборов для самостоятельной сборки и программирования роботов.
Рассмотрим несколько вариантов конструкторов, которые существуют на данный момент.
TETRIX – из конструктора этой серии можно строить прочных металлических роботов на радиоуправлении и создавать программируемых роботов, используя оборудование и программное обеспечение LEGO Mindstorms EV3 .
MATRIX – очень похож на конструктор TETRIX. Здесь тоже используются металлические детали и программное обеспечение LEGO Mindstorms EV3 .
Robotis Bioloid – содержит множество серий, самая распространенная из них STEM Standard: можно сделать 16 различных роботов по схемам .
Arduino – популярная платформа любительской и образовательной робототехники. Это серия плат ввода-вывода. Плата имеет аналоговые и цифровые порты, к которым можно подключать различные устройства: светодиоды, датчики, кнопки, моторы, сервоприводы и т.д. Оригинальные Arduino производятся в Италии, большинство аналогов — в Китае. Есть и российские разработки .
Я остановил свой выбор на конструкторе Lego Mindstorms, т.к. сегодня платформа Lego является безусловным лидером образовательной робототехники. Наборами Lego Mindstorms оснащены кружки во многих странах мира. Конструктор очень прочный, редко удается что-то сломать, и главное достоинство – это простота и скорость сборки. На мой взгляд, Lego Mindstorms – один из наиболее удобных и приятных способов начать свое знакомство с робототехникой.
4.Методы исследования
Mindstorms EV3 и среда его программирования
LEGO Mindstorms — конструктор для создания программируемого робота. В 2013 году в свет вышла модель LEGO Mindstorms EV3 .
Помимо обычных деталей Lego (балки, оси, пластины, и прочее) в набор EV3 входят:
• встроенные в моторы датчики вращения и ультразвуковой датчик;
• датчик цвета, гироскопический датчик и два датчика касаний;
• инфракрасный датчик;
• перезаряжаемая аккумуляторная батарея;
• три электро серво мотора;
• соединительные кабеля.
• USB-кабель .
При создании робота и программы для него, необходимо понимать суть работы каждого датчика т.к. данные знания дадут возможность правильно рассчитывать траекторию движения робота, его функциональность и т.д. Рассмотрим некоторые из них.
Главный элемент конструктора – это микрокомпьютер (микропроцессор) EV3, он является «мозгом» робота Mindstorms, который позволяет роботу Mindstorms ожить и осуществлять различные действия. Микрокомпьютер (микропроцессор) EV3 содержит в себе: процессор, FLASH память (16 мегабайт), операционную систему Linux и многое другое. Контролирует моторы и собирает данные с датчиков.
Одним из важнейших элементов конструктора является сервомотор. Данный элемент создан для работы с микрокомпьютером EV3 и имеет встроенный датчик вращения, благодаря которому мотор может соединяться с другими моторами, позволяя роботу двигаться с постоянной скоростью.].
Информацию об окружающем мире робот Lego Mindstorms EV3 получает от нескольких датчиков: ультразвукового, датчика касания и датчика, позволяющего распознавать цвета.
Ультразвуковой датчик EV3 позволяет измерять расстояние до объектов.
Датчик касания позволяет роботу реагировать на касания, распознает три ситуации: прикосновение, щелчок и освобождение. Также способен определить количество нажатий, как одиночных, так и множественных.
Датчик цвета дает возможность роботу определять цвет поднесенного к нему предмета, измеряет степень освещенности, рассеянный свет и отраженный свет.
Разобравшись с деталями Lego Mindstorms EV3, рассмотрим его программное обеспечение (ПО). ПО Mindstorms EV3 основано на LabVIEW, графическом языке программирования, которым пользуются ученые и инженеры по всему миру. ПО предоставляет возможность перетаскивать и размещать командные блоки. Таким образом, чтобы писать программы, следует размещать блоки функциональности на схеме. В зависимости от типа блока, каждый блок может быть сконфигурирован. Например, «Средний Мотор» имеет 5 режимов работы:
1.выключить,
2.включить и вращать,
3.включить в течение определенного количества секунд,
4.включить и повернуть на определенный градус,
5.включить и повернуть фиксированное число раз.
Есть широкий спектр программных блоков на выбор. Они сгруппированы в шесть категорий:
действие (зеленый),
управление потоком (оранжевый),
датчики (желтый),
операции над данными (красный),
дополнительные (синий),
мои Блоки (циановый) (рис.17).
Интуитивно понятный интерфейс позволяет сначала создавать простые программы, а затем продуктивно развивать свои навыки программирования, делая возможным создание сложных многоуровневых программ и проведения различной экспериментальной работы .
Создание робота на основе конструктора Mindstorms EV3
Создание робота на основе конструктора Mindstorms EV3 было разделено на несколько этапов:
1. составление задачи: какие действия должен выполнить робот;
2. сборка робота;
3.программирование робота на ПК согласно условиям задачи;
4.выгрузка материала непосредственно в робота;
5.проверка проделанной работы.
Составление задачи: какие действия должен выполнить робот
Экспериментируя с задачами для своего робота и изучая среду программирования, стало ясно, что робот может быть абсолютно любым и способен выполнять самые разнообразные действия, например:
робот, способный решать кубика рубика ;
робот-уборщик;
робот, играющий с человеком в «крестики-нолики»,
робот, машинка.
Я решила сконструировать роботизированную машинку. Составил следующую задачу: «машинка» может двигаться на определенном расстоянии: вперед-назад, повороты: плавные, квадратом, издавать звуки, показывать анимацию.
Сборка робота
Несмотря на внушительный арсенал набора, сборка робота, при использовании наглядной инструкции найденной в интернете, оказалась точно такой же, как и конструирование любого конструктора LEGO, а поскольку собирать конструкторы LEGO – это мое хобби с раннего детства, то на первом этапе сложностей для меня не возникло Однако при дальнейшей работе с роботом, конструкцию пришлось существенно дорабатывать, т.к. готовая модель не позволяла выполнить все условия поставленной мной задачи.
Программирование робота на ПК согласно условиям задачи
На этапе программирования робота в среде Lego Mindstorms EV3 на ПК начинается самое интересное.
Для осуществления поставленной задачи потребовалось использовать метод исследования «эксперимент» изучить множество материала, составить большое количество элементарных программ для выполнения роботом несложных действий. После этого мне стало ясно – для того чтобы робот был способен выполнить весь комплекс действий, согласно поставленной мной задаче, нужно прописать в программе всю цепочку действий, каждый шаг, каждое движение! В итоге получилась следующая программа .
Выгрузка материала непосредственно в робота
Подключение робота к ПК осуществляется нескольким способами: через порт USB, Bluetooth (блютуз) соединение или Wi-Fi соединение. Я выбрала порт USB , т.к. в этом случае робот привязан к компьютеру и программу на выполнение можно запускать прямо из среды программирования. Кроме того, во время выполнения программы появляется возможность визуально контролировать ход её выполнения (заголовки выполняющихся в данный момент программных блоков будут мерцать),можем отслеживать на компьютере. Также можно наблюдать текущие показания датчиков всё время, пока робот остается подключенным к среде программирования.
Таким образом, благодаря выбранной технологии передачи данных, готовая программа загрузилась просто и очень быстро.
Проверка проделанной работы
Органично сконструированная роботизированная собака, после загруженной в неё программы, выполнила все действия, согласно изложенным условиям: «машинка» двигалась и выполняет различные действия я считаю, что доказал тот факт, что изготовить простейшего робота своими руками возможно, изучив принцип работы робота и среду его программирования.
Выводы
Изучив историю робототехники, я узнал, что люди с древних времен хотели создать механизмы, которые могли бы выполнять вместо них тяжелую и вредную работу. Однако первые успехи в этом направлении появились только в середине 18 века. Одними из самых первых роботов того времени, были домашние механические куклы, созданные французским ученым Жаком де Викансон в 1738 году. Современная робототехника начинает формироваться в 60-х годах 20 века.
Исследовав виды современных роботов и функции, которые они выполняют,
я узнал, что современная робототехника полностью основана на компьютерных технологиях. Современные роботы делятся на две категории: рабочие и домашние.
Изучив некоторые виды робототехнических конструкторов, для достижения поставленной цели — создание домашнего робота – я изучил принцип строения и работы робота на основе конструктора Mindstorms EV3 и среду его программирования. Важнейшими элементами конструктора являются микрокомпьютер (микропроцессор) EV3, сервомотор и четыре датчика. Программное обеспечение Mindstorms EV3 основано на LabVIEW, графическом языке программирования, которым пользуются ученые и инженеры по всему миру.
Решение последней задачи нашей работы – создание робота на основе конструктора Mindstorms EV3 было разделено на несколько этапов:
1. составление задачи: какие действия должен выполнить робот;
2. сборка робота;
3.программирование робота на ПК согласно условиям задачи;
4.выгрузка материала непосредственно в робота;
5.проверка проделанной работы.
Сконструированная мной роботизированная машинка после загруженной в неё программы, выполнила все действия, согласно изложенным условиям. Таким образом, по итогам проделанной работы, можно сделать вывод, что, изучив принцип работы робота и среду его программирования, можно изготовить простейший робот своими руками. То есть гипотеза подтвердилась, цель и задачи проекта выполнены.
Работа над роботизированной машинкой еще не закончена, в планах – расширить её функции и использовать датчик касания, чтобы могло реагировать на прикосновения человека.
Но учитывая, что в процессе изучения конструктора Mindstorms EV3, я увидела огромное количество вариантов созданных роботов на основе этого конструктора, теперь мне очень хочется попробовать что-то новое, и это будет шагозавр!
В заключение хочу сказать, что я очень рада, что у меня получилось собрать и запрограммировать «машинку», процесс был интересный и увлекательный, кроме того я узнал много нового.
Список литературы
Клаузен, П. Компьютеры и роботы [Текст] / Пер. с нем. С.И. Деркунской. – Москва: Мир книги, 2006. – 48 с.
Копосов, Д.Г. Первый шаг в робототехнику: практикум для 5-6-го классов [Текст]: учеб. пособие / Д.Г. Копосов. — Москва: Бином. Лаборатория знаний, 2014. – 286 с.
Медицинские роботы [Электронный ресурс]. – Режим доступа: http://medrobot.ru/28-medicinskie-roboty-korotko-ob-istorii-i-yevolyucii.html / (дата обращения 02.12.2016)
Мир роботов [Электронный ресурс]. – Режим доступа: http://roboting.ru/industrial-robots / (дата обращения 26.11.2016)
Овсяницкая, Л.Ю. Курс программирования робота EV3 в среде Lego Mindstorms EV3 [Текст]: учеб. пособие / Л.Ю. Овсяницкая, Д.Н. Овсяницкий, А.Д. Овсяницкий — 2-е изд., перераб. и доп. – Москва.: Изд-во «Перо», 2016. – 300 с.
Овсяницкий, Д.Н. Ожившая механика. Шагающий робот-шагозавр [Текст]: учеб. пособие / Д.Н. Овсяницкий, Л.Ю. Овсяницкая, А.Д. Овсяницкий –Челябинск, Электронная книга, 2015. – 168 с.
Промышленная робототехника [Текст]: учеб. пособие / А.В. Бабич [и др.]. – Москва: Машиностроение, 1982. – 415 с.
Русецкий, А.Ю. В мире роботов [Текст]: Кн. для учащихся / А.Ю. Русецкий – Москва: Просвещение, 1990. – 160 с.
Филиппов, С.А. Основы робототехники на базе конструктора Mindstorms NXT [Электронный ресурс]. – Режим доступа: http://www.prorobot.ru/load/zaniatie_1-osnovy_konstruirovaniia.pdf / (дата обращения 19.10.2016)
Филиппов, С.А. Робототехника для детей и родителей [Текст]: научное издание / С.А. Филиппов – 3-е изд., перераб. и испр. — СПб.: Наука, 2010. – 319 с.
Mindstorms EV3 [Электронный ресурс]. – Режим доступа: https://www.lego.com/ru-ru/mindstorms / (дата обращения 10.10.2016)
xn--j1ahfl.xn--p1ai
Исследовательский проект «Мои домашние роботы»
Кабаков Александр, 3Б класс, МАОУ СОШ №1, г. Алапаевск
Исследовательский проект
Мои домашние роботы
Введение.
В детском саду, я много играл роботами-игрушками. Это были роботы-трансформеры, они так называются, потому что могут изменять форму, перестраиваться в машины. Про этих роботов есть много мультфильмов, кино и комиксов. Условно трансформеры делятся на два клана — автоботы и десептиконы, они враждуют между собой. Это военные роботы.
Когда я учился в 1 классе, мы с мамой посетили фестиваль робототехники в п. В. Синячиха, ВССОШ №3 (17 января 2015 года). Роботы там были разные, мы даже пробовали сами их собирать из конструктора Лего. Я понял, что роботы полезны, их можно использовать для игр, для работы и учебы.
Осенью 2015 года по телевизору я смотрел передачу про выставку «Бал роботов» в Екатеринбурге.
Постановка проблемы.
И я захотел, чтобы у меня дома тоже был робот. Могу я сам сделать робота?
Этой теме и посвящён мой исследовательский проект.
Гипотеза: в домашних условиях можно сделать несложного робота для мелких домашних работ.
Цель исследования: выяснить возможность создания небольших роботов в домашних условиях.
Задачи:
Освоить приемы исследовательской деятельности;
Выяснить значимость роботов в жизни современного человека;
Создать в домашних условиях мини-робота.
Методы исследования: изучение различных источников по теме (кино, мультфильмы, книги, интернет), беседы, анализ, обобщение, оформление результатов.
Итоговый продукт: маленький робот, который может толкать тележку, робот-дворник для уборки мелкого мусора.
Практическая значимость работы состоит в том, что её результаты помогут мне в дальнейшем изучении робототехники, могут быть использованы на занятиях в школе.
Чтобы проверить свою гипотезу, мне нужно узнать всё о роботах.
Мы нашли в Википедии историю появления слова «робот».
Ро́бот (чеш. robot, от robota — подневольный труд) — автоматическое устройство. Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком ). При этом робот может как и иметь связь с оператором (получать от него команды), так и действовать автономно.
Современные роботы, созданные на базе самых последних достижений науки и техники, применяются во всех сферах человеческой деятельности. Люди получили верного помощника, способного не только выполнять опасные для жизни человека работы, но и освободить человечество от однообразных рутинных операций. И. М. Макаров, Ю. И. Топчеев. «Робототехника: История и перспективы» |
Роботы — это машины, которые умеют работать без человека.
Оказывается, роботы нужны человеку для самых разных целей, поэтому они бывают не только военные, а ещё медицинские, роботы-спасатели, экскурсоводы, строители, разведчики, поющие роботы. Их делают в виде животных – собака-робот, кошка-робот, робот-насекомое. Или делают роботов, похожих на человека — это роботы-андроиды.
Я узнал, что слово «робот» придумал чешский писатель Карел Чапек в 1920 г. Много книг о роботах сочинил писатель-фантаст Айзек Азимов. Он считал, что роботы – это высокоразвитые машины. По мере написания рассказов о роботах он сформулировал три закона робототехники (рассказ «Хоровод»)
Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
Робот должен повиноваться всем приказам, которые отдает человек, кроме тех случаев, когда это противоречить 1 закону.
Робот должен заботиться о своей безопасности в той мере, в какой это не противоречить 1 и 2 законам.
Я слышал об этих законах, когда смотрел летом фильмы «Остров ржавого генерала» и «Приключения Электроника». Эти законы вносят в мозг роботов.
Я понял, что роботы появились не сами, их придумал человек для облегчения своего труда (работы). Человек умнее роботов, он может создавать роботов для своих целей, закладывать в них программы. Он даже придумал искусственный интеллект. Роботы с такими интеллектуальными программами могут заниматься творчеством, почти как человек.
Практическая часть.
Я очень люблю лепить роботов из пластилина, рисовать их в альбоме. Роботы из пластилина красивые, но они не могут работать. Это просто модели роботов, я могу придумать и придать им интересную форму.
А я хочу создать мини-робота, который сможет делать маленькую работу, прямо у себя дома.
У меня есть много старых игрушечных машин, батарейки, разные детали игрушечных роботов из лего.
Мы с папой разобрали несколько уже не нужных игрушечных машинок и нашли моторчики (двигатели), шурупы, провода.
Решили, что соберём маленького робота, который будет толкать тележку.
Это мой первый домашний робот. Я сделал его во втором классе и назвал его ДР – 1.
В этом учебном году я продолжил работу над проектом и сделал второго робота – ДРД -2. Это робот-дворник, он умеет подметать мелкий мусор.
Для изготовления второго робота мы с родителями сначала подготовили необходимые детали и приборы: блоки питания от старых компьютеров, щётки для одежды, батарейки «Крона», шурупы, шуруповёрт, паяльник.
Из старых блоков питания мы с папой взяли вентиляторы, они будут служить двигателями. Питание к ним будет подаваться от батарей. А щётки будут служить и инструментом дворника и нести на себе двигатели.
Когда первый рабочий вариант робота был собран, выяснилось, что питания 4 батарей не хватает для хорошей работы, робот двигался медленно. И мы решили модифицировать его – немного облегчить корпус с двигателями и добавить батарей. Второй вариант робота двигается гораздо быстрее.
Летом я планирую добавить моему роботу-дворнику элементы питания от солнечного света (солнечные батареи), тогда его способность к работе возрастёт. Я буду использовать его для уборки дорожек в маминой теплице и цветнике.
Заключение.
Я выяснил, что человек придумал роботов для того, чтобы они выполняли работу вместо него. Это удобно, когда работа тяжёлая и когда нужно работать долго и много. В этом случае роботы очень помогают человеку.
В результате исследования моя гипотеза подтвердилась – несложного робота можно сделать в домашних условиях из подручных материалов.
Я понял — для того, чтобы уметь делать роботов, мне нужно ещё многому учиться. Самые важные предметы – физика, информатика и математика.
Я думаю, что продолжу свою работу над домашними роботами.
В будущем я хочу изучать робототехнику. Для дальнейшей работы над созданием роботов я хочу изучить конструктор Лего Мидсторм.
Список использованной литературы и интернет-ресурсов:
Википедия https://ru.wikipedia.org/wiki/%D0%A0%D0%BE%D0%B1%D0%BE%D1%82
Фантастические фильмы и мультфильмы «Валл-И», «Приключения Электроника», «Остров ржавого генерала».
Р. Мэлоун «Восстановленные роботы: 10 проектов роботов». –2012 г., 8+, как сделать десять движущихся роботов из подручных вещей.
Источник Интернета, сайт http://mirnt.ru/gear_electronic/10-top-robots (10 самых полезных роботов)
4
multiurok.ru