все о роботах для детей, родителей, учителей и мейкеров
Новости робототехникиСтудент пятого курса института № 7 «Робототехнические и интеллектуальные системы» Московского авиационного института разработал устройство, предназначенное для поиска людей под завалами. Это дистанционно управляемый 50-сантиметровый робот,… далее »
Новости робототехникиРобот построен по классической схеме, как собаки Boston Dynamics или Unitree Robotics. Инженеры из НИИ механики МГУ и проекта Voltbro представили первого российского четвероногого робота. Другие… далее »
Новости робототехникиИнженеры вдохновились движениями кошки во время падения. Робототехники из Университета Нотр-Дам обучили четвероногих мини-гепардов навыкам самостабилизации в воздухе с помощью сапог.
Raspberry Pi Foundation представила новую плату-надстройку к большинству версий ее одноплатных миникомпьютеров, позволяющую управлять двигателями и датчиками роботов LEGO. Raspberry Pi Build HAT Raspberry Pi – популярный… далее »
Новости робототехникиИнженер-робототехник черпает вдохновение в биологических системах. В исследовании, опубликованном в Science Robotics, инженер-робототехник Ясемин Озкан-Айдын, доцент кафедры электротехники в Университете Нотр-Дам, рассказывает, как она… далее »
Девять российских регионов примут фестивали идей и технологий Кружкового движения Национальной технологической инициативы (НТИ) до конца 2021 года. Мероприятия состоятся в рамках Года… далее »
Мероприятия состоятся в рамках Года… далее »
У робота есть винтовка с дальностью прицельной стрельбы 1,2 км и тепловизором. Американские компании Ghost Robotics и S.W.O.R.D. Defense презентовали боевого робота на базе четвероногого робота Vision-60. Он оснащен большой… далее »
Роботизированная рука объединяет данные с камеры и антенны для поиска и извлечения предметов, даже если они закопаны в беспорядочную кучу вещей. Исследователи из… далее »
Мероприятия и конкурсыМероприятие позволяет школьникам посоревноваться в программировании роботов с учениками 5-11 классов всей страны в привычной школьной обстановке. В уже далеком 2014 году в… далее »
За час робот прокладывает около километра оптоволокна. Чтобы решить проблему и обеспечить больше людей более быстрым и надежным доступом в сеть Интернет, необходимы… далее »
Чтобы решить проблему и обеспечить больше людей более быстрым и надежным доступом в сеть Интернет, необходимы… далее »
Исследование проводится Высшей школой экономики (Пермь) совместно с порталом «Занимательная робототехника» и сетью секций образовательной робототехники «RoboUniver». В рамках панельной дискуссии «После бума:… далее »
Робот-дрон, похожий на цыпленка на каблуках, умеет превосходно балансировать. Инженеры из Калифорнийского технологического института (Калтеха) собрали гибридного робота Леонардо, который может балансировать на натянутой веревке и… далее »
Новости робототехникиВ октябре 2021 года «Академия наставников» — совместный проект Кружкового движения НТИ, Агентства стратегических инициатив и Фонда «Сколково» — запускает три новых онлайн-курса:… далее »
Для нового умения летательный аппарат оснастили липучкой. Инженеры из Нью-Йоркского университета предложили интересный способ посадить мультикоптер на стену. Специалисты модифицировали его, добавив в конструкцию липучки.… далее »
Инженеры из Нью-Йоркского университета предложили интересный способ посадить мультикоптер на стену. Специалисты модифицировали его, добавив в конструкцию липучки.… далее »
«Роботы и робототехника»
«Одна из великих проблем, с которой мы неизбежно столкнемся в будущем, — это проблема взаимодействия человека и машины, проблема правильного распределения функций между ними»
1. К2-17/1710
Роботы. Большая энциклопедия [Текст] : познакомьтесь с умными машинами, которые изменят мир / [пер. с англ. М. А. Райтмана]. — М. : Э, 2017. — 143 с. : ил. — (Подарочные издания. Большая энциклопедия).
2. Д10-17/40167
Джордан, Д.
Роботы [Текст] / Д. Джордан ; пер. с англ. — М. : Точка : Альпина Паблишер, 2017. — 10, 259 с. : ил. — (Завтра это будут знать все). — Библиогр.: с. 259.
3. Ж2-03/30333
Макаров, И. М.
Робототехника. История и перспективы [Текст] / И.М.Макаров,Ю.И.Топчеев. — М. : Наука ; Изд-во МАИ, 2003. — 349 с. : ил.
: Наука ; Изд-во МАИ, 2003. — 349 с. : ил.
4. Д10-17/45028
Маркофф, Д.
Homo Roboticus? Люди и машины в поисках взаимопонимания [Текст] : пер. с англ. / Д. Маркофф. — М. : Альпина нон-фикшн, 2017. — 404 с.
5. Д10-17/41848
Минделл, Д.
Восстание машин отменяется! Мифы о роботизации [Текст] / Д. Минделл ; пер. с англ. [В. Краснянской]. — М. : Альпина нон-фикшн, 2017. — 309 с. : ил. — (Искусственный интеллект).
6. Н/21029/1
Вибрационные технологии, мехатроника и управляемые машины [Текст] : сб. науч. ст. по материалам XII Междунар. науч.-техн. конф. «Вибрация — 2016» : в 2 ч. / отв. ред. С. Ф. Яцун. — Курск : Юго-Зап. гос. ун-т, 2016 — .
Ч. 1. — 2016. — 342 с. : ил.
7. Н/21029/2
Вибрационные технологии, мехатроника и управляемые машины [Текст] : сб. науч. ст. по материалам XII Междунар. науч.-техн. конф. «Вибрация — 2016» : в 2 ч. / отв. ред. С. Ф. Яцун. — Курск : Юго-Зап. гос. ун-т, 2016 — .
Ч. 2. — 2016. — 355 с. : ил.
8. М/16400/22
Бухштаб, Ю. А.
Воспоминания о Сергее Сергеевиче Камынине [Текст] / Ю. А. Бухштаб, С. И. Гримайло, Э. С. Луховицкая. — М., 2014. — 28 с. : ил. — (Препринт / Институт прикладной математики им. М. В. Келдыша (Москва) ; № 22). — Библиогр.: с. 28 (12 назв.).
9. Д10-17/43312
Маров, М. Я.
Советские роботы в солнечной системе. Технологии и открытия [Текст] / М. Я. Маров, У. Т. Хантресс. — 2-е изд., испр. и доп. — М. : ФИЗМАТЛИТ, 2017. — 611 с. : ил
10. Д10-13/3236
Хантресс, У. Т.
Советские роботы в солнечной системе. Технологии и открытия [Текст] / У. Т. Хантресс, М. Я. Маров. — М. : ФИЗМАТЛИТ, 2013. — 604 с. : ил.
11. Н/18003/13
Профессорский клуб (Владивосток).
Труды Профессорского клуба [Текст]. — Владивосток : [б. и.], 20 —
Вып. 13 : Робототехника. Геофизика. Химия. История. Экология. — 2011.
12. Д9-05/22601
Афанасьев, П. П.
Факультет «Робототехнические и интеллектуальные системы» [Текст] : (к 70-летию основания) / П. П. Афанасьев, В. И. Русланов; Под ред. В.А.Полковникова. — М. : Изд-во МАИ, 2005 (М.). — 222 с.
13. Н/20102/6(2012)
Московский гос. технический ун-т им. Н. Э. Баумана.
Вестник Московского государственного технического университета им. Н.Э. Баумана. Серия приборостроение [Текст] : науч.-теорет. и приклад. журн. широкого профиля: спец. вып. / Московский гос. технический ун-т им. Н. Э. Баумана. — М. : [б. и.], 20 — .
№ 6(2012) : Робототехнические системы. 30 лет Научно-учебному центру «Робототехника». — 2012. — 159 с. : ил.
14. Д8-99/52902
Юревич, Е. И.
ЦНИИ РТК. История создания и развития [Текст] / Е.И.Юревич. — 2-е изд.,доп. — СПб. : Изд-во СПбГТУ, 1999. — 112 с. : ил. — 230 экз. — В надзаг.:С.-Петерб.гос.техн. ун-т, Центр.н.-и. и опыт. -конструкт. ин-т робототехники и техн. кибернетики(ЦНИИ РТК)
-конструкт. ин-т робототехники и техн. кибернетики(ЦНИИ РТК)
15. Д7-90/81533
Шахинпур, М.
Курс робототехники [Текст] / М.Шахинпур;Пер. с англ. С. С. Дмитриева; Под ред. С. Л. Зенкевича]. . — М. : Мир, 1990. — 527 c. : ил.
16. Ж2-10/47593
Юревич, Е. И.
Основы роботехники [Текст] : учеб. пособие / Е. И. Юревич. — 3-е изд. — СПб. : БХВ-Петербург, 2010 (СПб.). — 359 с. : ил.
17. Д9-12/93000
Курышкин, Н. П.
Основы робототехники [Текст] : учеб. пособие / Н. П. Курышкин. — Кемерово : [б. и.], 2012. — 168 с. : ил.
18. Ж2-14/57562
Дробот, П. Н.
Основы мехатроники и робототехники [Текст] : учеб. пособие / П. Н. Дробот, С. В. Щербинин ; Том. гос. ун-т систем упр. и радиоэлектроники. — Томск : Эль Контент, 2014. — 143 с. : ил.
19. Д10-16/39079
Яблоков, А. С.
Основы робототехники [Текст] : конспект лекций / А. С. Яблоков ; Волж. гос. ун-т вод. трансп., Каф. приклад. механики и подъем.-трансп. машин. — Н. Новгород : ВГУВТ, 2016. — 92 с. : ил.
приклад. механики и подъем.-трансп. машин. — Н. Новгород : ВГУВТ, 2016. — 92 с. : ил.
20. Д10-17/48283
Основы образовательной робототехники [Текст] : учеб.-метод. пособие / авт.-сост. Д. М. Гребнева. — Нижний Тагил : Нижнетагил. гос. соц.-пед. ин-т (фил.) Рос. гос. проф.-пед. ун-та, 2017. — 108 с. : ил.
21. Д10-16/38687
Введение в мехатронику и робототехнику [Текст] : учеб. пособие / С. Ф. Яцун [и др.]. — Курск : Унив. кн., 2016. — 121 с. : ил.
22. М/69624/7
Мехатроника. Робототехника. Автоматизация [Текст] : сб. науч. тр. / Моск. гос. ун-т приборостроения и информатики. — М. : МГУПИ, 20 — -.
Вып. 7. — 2014. — 181 с. : ил.
23. Н/18305/1
Корендясев А. И.
Теоретические основы робототехники [Текст] : в 2-х кн. / А. И. Корендясев, Б. Л. Саламандра, Л. И. Тывес; Под ред. С.М.Калпунова. — М. : Наука, 2006 — . — В надзаг.: Ин-т машиноведения им. А. А. Благонравова.
Кн. 1. — 2006. — 383 с. — Библиогр.: с. 378-379.
— 383 с. — Библиогр.: с. 378-379.
24. Н/18309/2
Корендясев А. И.
Теоретические основы робототехники [Текст] : в 2 кн. / А. И. Корендясев, Б. Л. Саламандра, Л. И. Тывес; Под ред. С.М. Каплунова. — М. : Наука, 2006 — . — В надзаг.: Рос. АН, Ин-т машиноведения им. А. А. Благонравова.
Кн. 2. — 2006. — 376 с.
25. Д9-08/44229
Робототехника, прогноз, программирование [Текст] / Ю. М. Баяковский [и др.] ; предисл. Ю. П. Попова и Г. Г. Малинецкого. — М. : URSS, 2008 (М.). — 202 с. : ил.
26. Д10-14/17820
Дмитриева, О. А.
Образовательная робототехника [Текст] : лекции / О. А. Дмитриева ; Челяб. гос. пед. ун-т. — Челябинск : Изд-во Челяб. гос. пед. ун-та, 2014. — 144 с.
27. Ж2-11/51968
Специальная робототехника и мехатроника [Текст]. — М. : [б. и.], 2011. — 164 с. : ил. — (Вестник Московского государственного технического университета им. Н.Э. Баумана. Серия «Машиностроение» : спец. вып.).
вып.).
28. Д9-10/74665
Мехатроника и робототехника. Современное состояние и тенденции развития [Текст] : сб. тез. и ст. Всерос. конф. с элементами науч. шк. для молодежи : 20-24 сент. 2010 г., г. Новочеркасск / «Донские технологии», науч.-произв. предприятие (Новочеркасск). — Новочеркасск : ЛИК, 2010. — 163 с. : ил.
29. Д9-13/98317
Егоров, О. Д.
Прикладная механика мехатронных устройств [Текст] : учеб. пособие / О. Д. Егоров. — М. : Станкин, 2013. — 229 с. : ил.
30. Д10-14/9932
Егоров, О. Д.
Прикладная механика робототехнических устройств [Текст] : учеб. пособие / О. Д. Егоров. — М. : Станкин, 2014. — 372 с. : ил. — Библиогр.: с. 329.
31. Ж2-10/48418
Механика миниатюрных роботов [Текст] / В. Г. Градецкий [и др.]. — М. : Наука, 2010. — 271 с. : ил.
32. Д10-14/15330
Вязовов, С. М.
Соревновательная робототехника: приемы программирования в среде EV3 [Текст] : учеб. -практ. пособие / С. М. Вязовов, О. Ю. Калягина, К. А. Слезин ; Всерос. учеб.-метод. центр образоват. робототехники. — М. : Перо, 2014. — 132 с. : ил.
-практ. пособие / С. М. Вязовов, О. Ю. Калягина, К. А. Слезин ; Всерос. учеб.-метод. центр образоват. робототехники. — М. : Перо, 2014. — 132 с. : ил.
33. М/71345/1
Рыбаков А. В.
Проектирование мехатронных и робототехнических систем [Текст] : учеб. пособие по дисциплине «Проектирование роботов и робототехн. систем» для студентов направления подгот. «Мехатроника и робототехника» : [в 2 ч.] / А. В. Рыбаков, Н. А. Выборнов ; Астрах. гос. ун-т. — Астрахань : Астрах. ун-т, 2016 — .
Ч. 1 : Основы проектирования. Правила разработки технической документации. Выбор оборудования. — 2016. — 141 с. : ил.
34. М/71414/1
Инженерная книга [Текст] : сб. лучших творч. проектов участников Всерос. робототехн. соревнований «ИКаР» для решения реал. произв. задач. — М. : Перо, 2017 — . — (Инженерные кадры России — от детского сада до производства).
Ч. 1. — 2017. — 160 с. : ил.
35. Д10-16/41972
Мехатроника и робототехника: моделирование и управление мультироторными летающими роботами [Текст] : учеб. пособие / С. Ф. Яцун [и др.]. — Курск : Юго-Зап. гос. ун-т, 2016. — 126 с. : ил. — Авт. указ. на обороте тит. л. — Библиогр.: с. 116-126 (102 назв.).
пособие / С. Ф. Яцун [и др.]. — Курск : Юго-Зап. гос. ун-т, 2016. — 126 с. : ил. — Авт. указ. на обороте тит. л. — Библиогр.: с. 116-126 (102 назв.).
36. Д9-07/46075
Лавров, В. Ю.
Механика роботов-манипуляторов и ее реализация программой CaDMan [Текст] : учеб. пособие / В. Ю. Лавров. — СПб. : Балт. гос. техн. ун-т, 2007 (СПб.). — 132 с.
37. Д8-04/96945
Хватов, Б. Н.
Технологическая подготовка роботизированных комплексов [Текст] : учеб. пособие / Б. Н. Хватов, А. Н. Овсеенко, В. А. Тимирязев. — Тамбов : Изд-во ТГТУ, 2004. — 127 с. : ил.
38. Д10-16/42738
Умнов, В. П.
Построение и моделирование манипуляционных исполнительных систем многофункциональных роботизированных технологических центров [Текст] : учеб. пособие / В. П. Умнов ; Владим. гос. ун-т им. А. Г. и Н. Г. Столетовых. — Владимир : ВлГУ, 2016. — 119 с. : ил.
39. Д9-10/83374
Основы теории исполнительных механизмов шагающих роботов [Текст] / А. К. Ковальчук [и др.]. — М. : Рудомино, 2010. — 167 с. : ил. — (Двуногие шагающие роботы).
К. Ковальчук [и др.]. — М. : Рудомино, 2010. — 167 с. : ил. — (Двуногие шагающие роботы).
40. Д9-12/91239
Кун, С.
Структурный синтез параллельных механизмов [Текст] : пер. с англ. / С. Кун, К. Госселин. — М. : Физматлит, 2012. — 275 с. –
41. Д10-14/10775
Мобильные робототехнические комплексы [Текст] : сб. статей / С. А. Мосиенко [и др.]. — М. : Сам Полиграфист, 2014. — 118 с. : ил.
42. Д10-14/15026
Инновационные образовательные конструкторы и робототехника в образовательном процессе [Текст] : материалы Всерос. форума. — Челябинск : ЧИППКРО, 2014. — 141 с. : ил.
43. Д9-12/96674
Автоматизация и роботизация технологических процессов [Текст] : материалы регион. науч.-техн. конф. (г. Воронеж, 16-17 нояб. 2012 г.) / Воронежский гос. технический ун-т. — Воронеж : Воронеж. гос. техн. ун-т, 2012. — 117 с. : ил
44. Д9-12/88162
Егоров, О. Д.
Расчет и конструирование мехатронных модулей [Текст] : учеб. пособие / О. Д. Егоров, Ю. В. Подураев. — М. : Станкин, 2012. — 422 с. : ил.
пособие / О. Д. Егоров, Ю. В. Подураев. — М. : Станкин, 2012. — 422 с. : ил.
45. Д9-12/87548
Егоров, О. Д.
Конструирование механизмов роботов [Текст] : учебник / О. Д. Егоров. — М. : Абрис, 2012. — 444 с. : ил. — Библиогр.: с. 414-415.
46. Д9-08/57008
Костров, Б. В.
Искусственный интеллект и робототехника [Текст] : учеб. пособие / Б. В. Костров, В. Н. Ручкин, В. А. Фулин. — М. : Диалог-МИФИ, 2008 (Подольск (Моск. обл.)). — 224 с. : ил.
47. Д10-13/9259
Рыбак, Л. А.
Роботы и робототехнические комплексы [Текст] : учеб. пособие / Л. А. Рыбак, Е. В. Гапоненко, Ю. А. Мамаев. — Белгород : Изд-во БГТУ, 2013. — 84 с. : ил.
48. Д9-12/86370
Робототехника и искусственный интеллект [Текст] : материалы III Междунар. научно-практ. конф., г. Железногорск, 2 декабря 2011 г. / Сибирский федеральный ун-т (Красноярск), Железногорский филиал. — Красноярск : Центр информ., 2012. — 136 с.
49. Д10-13/4859
Д10-13/4859
Робототехника и искусственный интеллект [Текст] : материалы V Всерос. науч.-техн. конф. с междунар. участием, 15 нояб. 2013 г. / Сибирский федеральный ун-т (Красноярск), Железногорский филиал ; под науч. ред. В. А. Углева. — Железногорск : Б. и., 2013. — 183 с. : ил.
50. Д9-12/93093
Станкевич, Л. А.
Искусственный интеллект и искусственный разум в робототехнике [Текст] : учеб. пособие / Л. А. Станкевич, Е. И. Юревич. — СПб. : Изд-во Политехн. ун-та, 2012. — 166 с.
51. Д9-09/78259
Ефремов, Д. А.
Методы искусственного интеллекта в робототехнике [Текст] : учеб. пособие / Д. А. Ефремов. — Воронеж : [б. и.], 2009. — 115 с.
52. Д10-15/28221
Интеллектуальные мехатронные системы [Текст] : учеб. пособие / И. В. Абрамов [и др.] ; Ижев. гос. техн. ун-т им. М. Т. Калашникова. — Ижевск : Изд-во ИжГТУ им. М. Т. Калашникова, 2015. — 190 с. : ил
53. Ж2-05/35643
Воротников, С. А.
Информационные устройства робототехнических систем [Текст] : учеб. пособие / С.А. Воротников. — М. : Изд-во МГТУ им. Н. Э. Баумана, 2005. — 383 с. : ил. — (Робототехника).
54. Д9-09/66082
Войнов, К. Н.
Механика манипуляторов и обеспечение надежности функционирования робототехнических систем [Текст] / К. Н. Войнов, В. Ю. Лавров. — СПб. : [б. и.], 2009. — 99 с.
55. Д7-91/90264
Меркулов, А. П.
Что могут роботы [Текст] / А.П.Меркулов. — 2.изд., перераб. и доп. — М. : Машиностроение, 1991. — 193 с.
2.Типы роботов. Системы управления56. Д10-13/1304
Вибрационные мобильные роботы [Текст] / С. Ф. Яцун [и др.]. — Курск : ЮЗГУ, 2013. — 181 с. : ил. — Авт. указ. на обороте тит. л. — Библиогр.: с. 175-181 (75 назв.).
57. Ж2-17/61318
621.86/М 767
Момот, М. В.
Мобильные роботы на базе Arduino [Текст] / М. В. Момот. — СПб. : БХВ-Петербург, 2017. — 288 с. : ил.
В. Момот. — СПб. : БХВ-Петербург, 2017. — 288 с. : ил.
58. Д10-14/1414
Краснова, С. А.
Блочный синтез систем управления роботами-манипуляторами в условиях неопределенности [Текст] / С. А. Краснова. — М. : URSS, 2014. — 202 с. : ил.
59. Ж2-04/34192
Предко, М.
Устройства управления роботами: схемотехника и программирование [Текст] : пер. с англ. / М. Предко. — М. : ДМК, 2004. — 404 с. : ил.
60. Д9-12/96782
Волков, А. Н.
Проектирование робототехнических систем [Текст] : учеб. пособие / А. Н. Волков, А. Н. Тимофеев. — СПб. : Изд-во Политехн. ун-та, 2012. — 369 с. : ил.
61. Д9-13/96414
Юревич, Е. И. Сенсорные системы в робототехнике [Текст] : учеб. пособие / Е. И. Юревич. — СПб. : Изд-во Политехн. ун-та, 2013. — 100 с. : ил.
62. Д9-10/83374
Основы теории исполнительных механизмов шагающих роботов [Текст] / А. К. Ковальчук [и др.]. — М. : Рудомино, 2010. — 167 с. : ил. — (Двуногие шагающие роботы).
К. Ковальчук [и др.]. — М. : Рудомино, 2010. — 167 с. : ил. — (Двуногие шагающие роботы).
63. Д10-14/14330
Игнатова, Е. И.
Системы управления движением роботов. Компьютерное проектирование [Текст] / Е. И. Игнатова, А. В. Лопота, Н. В. Ростов ; Центр. науч.-исслед. и опыт.-конструкт. ин-т робототехники и техн. кибернетики (ЦНИИ РТК). — СПб. : Изд-во Политехн. ун-та, 2014. — 301 с. : ил.
64. Д10-14/14068
Тывес, Л. И.
Механизмы робототехники. Концепция развязок в кинематике, динамике и планировании движений [Текст] / Л. И. Тывес. — М. : URSS, 2014. — 203 с. : ил.
65. Д10-13/8778
Проектирование систем приводов шагающих роботов с древовидной кинематической структурой [Текст] : учеб. пособие по курсу «Гидроприводы стационар. и мобил. объектов» / Л. А. Каргинов [и др.]. — М. : [б. и.], 2013. — 115 с. : ил.
66. Д9-12/90179
Чадеев, В. М.
М.
Самовоспроизведение механических роботов [Текст] / В. М. Чадеев, Н. И. Аристова. — М. : СИНТЕГ, 2012. — 309 с. :
67. Д9-11/89715
624.86/С 654
Сорокин, П. А.
Электрические приводы роботов [Текст] : учеб. пособие / П. А. Сорокин, Я. С. Власов. — М. : [б. и.], 2011. — 215 с. : ил.
68. М/16400/16
Терехов, Г. П.
Управление роботом-шаром с помощью маховиков [Текст] / Г. П. Терехов, В. Е. Павловский. — М. : ИПМ им. М. В. Келдыша РАН, 2017. — 31 с. : ил. — (Препринт / Институт прикладной математики им. М. В. Келдыша (Москва) ; 16 за 2017 г.).
69. Д9-08/55540
Попов, А. В.
Роботы с силовым очувствлением [Текст] : учеб. пособие / А. В. Попов, Е. И. Юревич. — СПб. : Астерион, 2008 (СПб.). — 73 с. : ил.
70. Д9-04/1472
Юревич, Е. И.
Роботы ЦНИИ РТК на Чернобыльской АЭС и развитие экстремальной робототехники [Текст] / Е. И.Юревич. — СПб. : Изд-во СПбГПУ, 2004. — 264 с
И.Юревич. — СПб. : Изд-во СПбГПУ, 2004. — 264 с
71. Ж2-07/41081
Интеллектуальные роботы [Текст] : учеб. пособие / И. А. Каляев [и др.] ; под общ. ред. Е. И. Юревича. — М. : Машиностроение, 2007 (М.). — 360 с. : ил.
72. Д10-11/25404
621.86/Л 771
Лопатин, П. К.
Интеллектуальные манипуляционные роботы [Текст] : учеб. пособие / П. К. Лопатин ; Сиб. гос. аэрокосм. ун-т им. М. Ф. Решетнева. — Красноярск : Сиб. гос. аэрокосм. ун-т, 2011. — 203 с. : ил.
73. Д9-10/72510
Булгаков, А. Г.
Интеллектуальные системы планирования перемещения мобильного робота в неизвестной среде [Текст] / А. Г. Булгаков, Чинь Суан Лонг. — Новочеркасск : НОК, 2010 (Новочеркасск). — 123 с. : ил.
74. Д8-02/76995
Лесной, Б. В.
Промышленные роботы и роботизированные технологические комплексы [Текст] : структура и кинематика промышленных роботов / Б. В.Лесной,А.Д.Малахов. — Волгоград : [б. и.], 2002. — 83 с. : ил.
В.Лесной,А.Д.Малахов. — Волгоград : [б. и.], 2002. — 83 с. : ил.
75. Д9-07/42558
Булгаков, А. Г.
Промышленные роботы. Кинематика, динамика, контроль и управление [Текст] / А. Г. Булгаков, В. А. Воробьев. — М. : СОЛОН-Пресс, 2007 (Железнодорожный). — 485 с. : ил.
76. Д9-11/72402
621/К 593
Козырев, Ю. Г.
Применение промышленных роботов [Текст] : учеб. пособие / Ю. Г. Козырев. — М. : КноРус, 2011 (Москва). — 488 с. : ил.
77. Ж2-13/57160
Моисеев, Ю. И.
Применение промышленных роботов для загрузки металлообрабатывающего оборудования [Текст] : учеб. пособие / Ю. И. Моисеев. — Курск : Изд-во Курган. гос. ун-та, 2013. — 169 с. : ил.
78. Д9-11/70704
Козырев, Ю. Г.
Захватные устройства и инструменты промышленных роботов [Текст] / Ю. Г. Козырев. — М. : КноРус, 2011. — 311 с. : ил.
: ил.
79. Д10-15/13224
Москвичев, А. А.
Захватные устройства промышленных роботов и манипуляторов [Текст] : учеб. пособие / А. А. Москвичев, А. Р. Кварталов, Б. В. Устинов. — М. : Форум, 2015. — 175 с. : ил.
80. Д9-05/24598
Паршин, Д. Я.
Теоретические основы и практическое применение строительных роботов и мехатронных комплексов [Текст] / Д. Я. Паршин. — Ростов н/Д : РГАСХМ, 2005 (Ростов н/Д). — 265 с.
81. Д9-10/68800
621.86/П 253
Пенский, О. Г.
Математические модели эмоциональных роботов [Текст] / О. Г. Пенский. — Пермь : [б. и.], 2010 (Пермь). — 192 с. : ил.
82. Д7-92/98456
Колосенцева, И. А.
Роботы и их использование в химико-технологических производствах [Текст] : учеб. пособие / И.А.Колосенцева. — М. : МИПК, 1992. — 63 с. : ил.
83. Д8-95/19651
621. 86/Р 584
86/Р 584
Роботы и автоматизированные системы управления технологическими процессами [Текст] : v науч.-техн.конф.:Материалы конф. / Под науч.ред.Е.И.Юренича. — СПб : [б. и.], 1995. — 111 c. : ил.
84. Д9-11/82920
Рутковский, В. Ю.
Многорежимный свободнолетающий космический манипуляционный робот: уравнения движения, управления, программное обеспечение [Текст] / В. Ю. Рутковский, В. М. Суханов, В. М. Глумов. — М. : [б. и.], 2011 (Москва). — 159 с. —
85. Н/12013/ИАЭ-6684/3
Абалин, С. С. Роботы на объекте «Укрытие» Чернобыльской АЭС [Текст] / С. С. Абалин, А. А. Боровой, А. В. Перфилов. — М., 2011. — 44 с. : ил.
86. Д10-16/32220
Подъемно-транспортные, строительные, дорожные, путевые машины и робототехнические комплексы [Текст] : материалы XX Моск. межвуз. науч.-техн. конф. студентов, аспирантов и молодых ученых, 14-15 апр. 2016 г., Москва / Моск.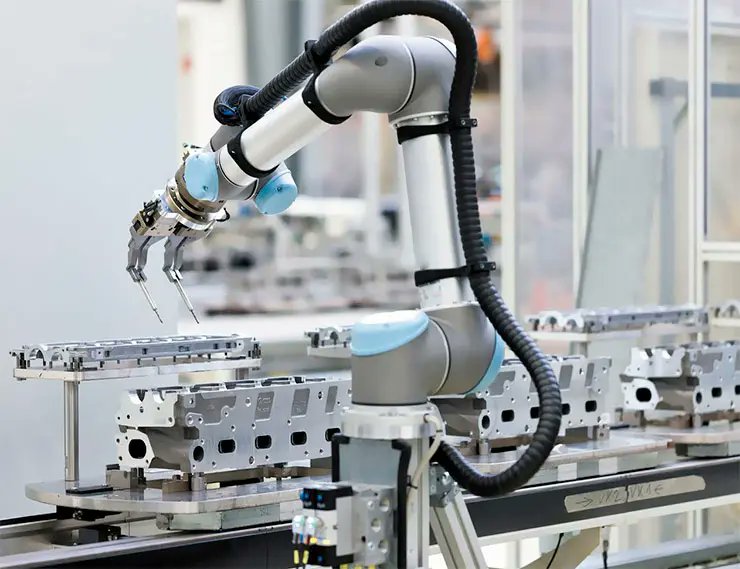 гос. акад. вод. трансп. — М. : МГАВТ, 2016. — 257 с. : ил.
гос. акад. вод. трансп. — М. : МГАВТ, 2016. — 257 с. : ил.
87. Д10-14/18088
Коноваленко, Л. Ю.
Опыт использования роботов при переработке сельскохозяйственного сырья [Текст] : науч. анал. обзор / Л. Ю. Коноваленко ; Рос. науч.-исслед. ин-т информации и техн.-экон. исслед. по инженер.-техн. обеспечению агропром. комплекса (ФГБНУ «Росинформагротех»). — М. : Росинформагротех, 2014. — 75 с. : ил.
88. Ж2-12/53866
Красильников, А. В.
Испытания пусковых устройств подводных роботов [Текст] / А. В. Красильников, О. И. Ефимов, В. А. Валетов. — СПб. : [б. и.], 2012. — 101 с. :
89. Ж2-12/52135
681.5/Л 841
Лукинов, А. П.
Проектирование мехатронных и робототехнических устройств [Электронный ресурс] : учеб. пособие / А. П. Лукинов. — Электрон. текстовые дан. — СПб. [и др.] : Лань, 2012. — 605 с. :
Приложение:
Сопроводительный материал :
_?1,,,,I=ОДМ/2064?ОДМ/2064 (электрон. опт. диск (CD-ROM)_
опт. диск (CD-ROM)_
90. Д9-12/89535
629.73/П 781
Проблемы совершенствования робототехнических и интеллектуальных систем летательных аппаратов [Текст] : сб. докл. IX-й Всерос. науч.-техн. конф., Москва, МАИ, 25-27 мая 2005 г. / Московский авиационный ин-т. — М. : МАИ-Принт, 2012. — 441 с. : ил.
91. Д9-11/89267
Лучин, Р. М.
Программирование встроенных систем. От модели к роботу [Текст] / Р. М. Лучин; под ред. А. Л. Фрадкова. — СПб. : Наука, 2011. — 183 с. : ил. — (Шаги в кибернетику).
92. М/70224/3
Проблемы механики современных машин [Текст] : материалы VI Междунар. конф., 29 июня — 4 июля 2015 г. / Рос. АН. Науч. совет РАН по проблемам машиноведения и технол. процессов. — Улан-Удэ : Изд-во ВСГУТУ, 20 — . — Загл. обл. : Проблемы механики современных машин.
Т. 3 : Секция «Механика и управление движением шагающих машин и роботов».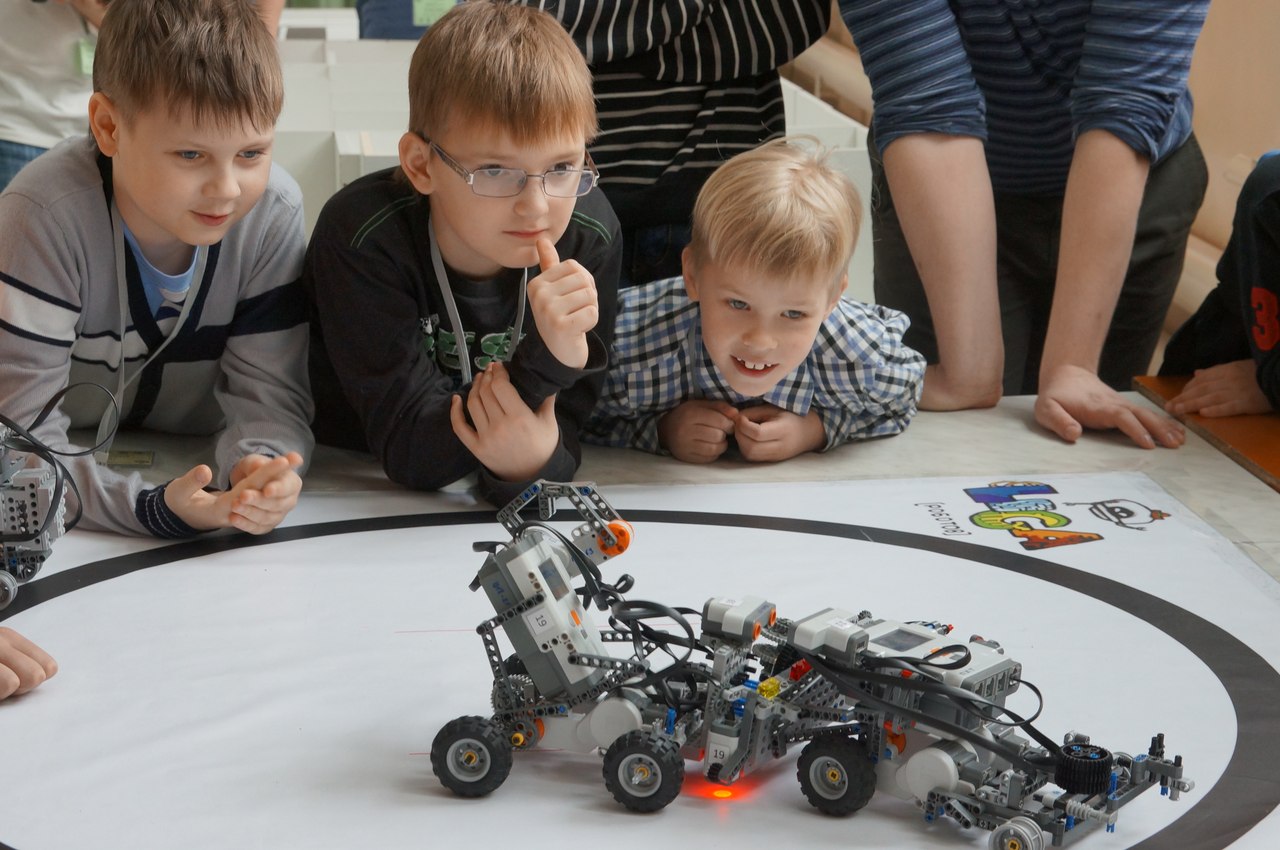 Секция «Моделирование, управление , автоматизация проектирования механических систем». Секция «Мехатронные системы». — 2015. — 301 с. : ил.
Секция «Моделирование, управление , автоматизация проектирования механических систем». Секция «Мехатронные системы». — 2015. — 301 с. : ил.
93. Д10-15/27118
Яцун, С. Ф.
Многозвенный прыгающий робот с поступательной разгонной парой [Текст] : монография / С. Ф. Яцун, О. Г. Локтионова, Л. Ю. Ворочаева ; Юго-Зап. гос. ун-т. — Курск : Юго-Зап. гос. ун-т, 2015. — 210 с. : ил.
94. Д9-12/87461
Волкоморов, В. И.
Технология роботизированного производства [Текст] : учеб. пособие / В. И. Волкоморов, А. В. Марков. — СПб. : [б. и.], 2012. — 119 с. : ил.
95. Д8-02/82479
004/К 179
Каляев, И. А.
Распределенные системы планирования действий коллективов роботов [Текст] / И.А.Каляев,А.Р.Гайдук,С.Г.Капустян;Под ред.И.А.Каляева. — М. : Янус-К, 2002. — 291 с. : ил.
96. Д9-05/10765
Потапова, Р. К.
Речевое управление роботом [Текст] : лингвистика и современные автоматизированные системы / Р. К. Потапова. — 2-е изд., перераб. и доп. — М. : КомКнига : УРСС, 2005. — 324 с. : ил.
К. Потапова. — 2-е изд., перераб. и доп. — М. : КомКнига : УРСС, 2005. — 324 с. : ил.
97. М/16400/15 за 2017 г.
Голубев, Ю. Ф.
Преодоление шестиногим роботом неширокой водной преграды на плоту [Текст] / Ю. Ф. Голубев, В. В. Корянов. — М. : ИПМ им. М. В. Келдыша РАН, 2017. — 16 с. : ил.
98. М/16400/50 за 2015 г.
Голубев, Ю. Ф.
Движение инсектоморфного робота с использованием незакрепленных шаров [Текст] / Ю. Ф. Голубев, В. В. Корянов. — М. : ИПМ им. М. В. Келдыша РАН, 2015. — 23 с. : ил. — (Препринт / Институт прикладной математики им. М. В. Келдыша (Москва) ; 50 за 2015 г.).
99. Д10-15/22602
621.86/621.86/
Гуревич, Ю. Е. Подъемно-транспортные и робототехнические устройства [Текст] : учеб. пособие / Ю. Е. Гуревич. — М. : Янус-К, 2015. — 343 с. : ил.
100. М/16400/25
Давыдов, О. И.
Алгоритм управления дифференциальным приводом мобильного робота РБ-2 [Текст] / О. И. Давыдов, А. К. Платонов. — М. : ИПМ им. М. В. Келдыша РАН, 2015. — 17 с. : ил. — (Препринт / Институт прикладной математики им. М. В. Келдыша (Москва) ; 25 за 2015 г.).
И. Давыдов, А. К. Платонов. — М. : ИПМ им. М. В. Келдыша РАН, 2015. — 17 с. : ил. — (Препринт / Институт прикладной математики им. М. В. Келдыша (Москва) ; 25 за 2015 г.).
101. М/16400/15
Давыдов, О. И.
Сеть Пассфреймов — комбинированная модель операционной среды мобильного робота [Текст] / О. И. Давыдов, А. К. Платонов. — М. : ИПМ им. М. В. Келдыша РАН, 2015. — 28 с. : ил. — (Препринт / Институт прикладной математики им. М. В. Келдыша (Москва) ; 15 за 2015 г.).
102. Д10-14/19442
Жуков, Ю. И.
Информационное моделирование пространственной ориентации и навигации подводных роботов [Текст] / Ю. И. Жуков, Ю. Л. Сиек, Е. В. Хуторная ; С.-Петерб. гос. мор. техн. ун-т. — СПб. : Изд-во СПбГМТУ, 2014. — 123 с. : ил.
103. Д10-16/40599
Антошина, Е. А.
Информационные устройства робототехнических систем [Текст] : учеб.-метод. пособие / Е. А.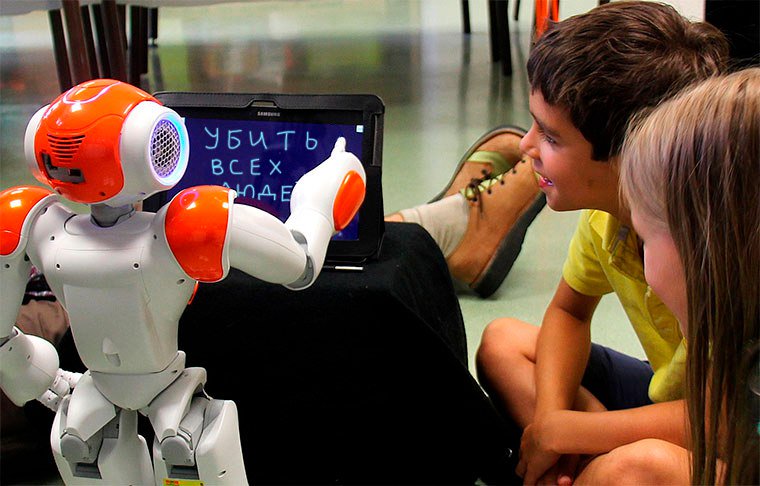 Антошина ; Ковров. гос. технол. акад. им. В. А. Дегтярева. — Ковров : КГТА им. В. А. Дегтярева, 2016. — 71 с. : ил.
Антошина ; Ковров. гос. технол. акад. им. В. А. Дегтярева. — Ковров : КГТА им. В. А. Дегтярева, 2016. — 71 с. : ил.
104. Д10-16/40598
Антошина, Е. А.
Моделирование робототехнических систем [Текст] : учеб.-метод. пособие / Е. А. Антошина ; Ковров. гос. технол. акад. им. В. А. Дегтярева. — Ковров : КГТА им. В. А. Дегтярева, 2016. — 59 с. : ил.
105. Д10-14/14330
Игнатова, Е. И.
Системы управления движением роботов. Компьютерное проектирование [Текст] / Е. И. Игнатова, А. В. Лопота, Н. В. Ростов ; Центр. науч.-исслед. и опыт.-конструкт. ин-т робототехники и техн. кибернетики (ЦНИИ РТК). — СПб. : Изд-во Политехн. ун-та, 2014. — 301 с. : ил.
106. М/16400/102 за 2013 г
Павловский, В. Е.
Тональная мультичастотная акустическая коммуникация роботов [Текст] / В. Е. Павловский, А. Ю. Кирков. — М. : ИПМ, 2013. — 32 с. : ил.
107. М/16400/86 за 2012 г
М/16400/86 за 2012 г
Павловский, В. Е.
Модульная микроконтроллерная система управления роботами РОБОКОН-1 [Текст] / В. Е. Павловский, В. В. Павловский. — М. : ИПМ им. М.В. Келдыша, 2012. — 32 с. : ил.
108. Д9-12/89162
Ронжин, А. Л.
Методы и средства интеллектуального управления мобильным информационным роботом [Текст] : учеб. пособие / А. Л. Ронжин, М. В. Прищепа, В. Ю. Будков. — СПб. : ГУАП, 2012. — 64 с. : ил.
109. Д9-10/74821
621.86/П 253
Пенский, О. Г.
Основы математической теории эмоциональных роботов [Текст] / О. Г. Пенский, К. В. Черников. — Пермь : [б. и.], 2010 (Пермь). — 256 с.
110. Д9-10/75348
Цюй Дуньюэ
Разработка математической модели для управления колесными роботами [Текст] / Цюй Дуньюэ. — М. : Перо, 2010 (М.). — 172 с. : ил.
111. М/48068/2
М/48068/2
Кривонос А. Я.
Металлорежущие станки и промышленные роботы [Текст] : текст лекций / А. Я. Кривонос. — Челябинск : [б. и.], 19 — . — В надзаг.:Челяб.политехн.ин-т им.Ленин.комсомола,Каф.»Станки и инструмент».
Ч. 2. — 1990. — 76 с
112. Д8-91/1096
Акулов, Г. А.
Роботы и манипуляторы деревообрабатывающих производств. Основы расчета и конструирования роботов и манипуляторов деревообрабатывающих производств [Текст] : учеб. пособие для студентов спец. 17.04 / Г. А. Акулов, С. П. Гузюк, Ю. В. Малышев. — СПб. : [б. и.], 1992. — 103 с. : ил
113. Д8-02/73141
Мурашев, В. П.
Роботы и манипуляторы в лесном комплексе [Текст] : учеб. для студентов вузов по специальности «Машины и оборудование для лес. комплекса» / В.П.Мурашев. — М. : Изд-во МГУЛ, 2002. — 239 с. : ил.
114. Д9-10/82968
Ивацевич, Ю.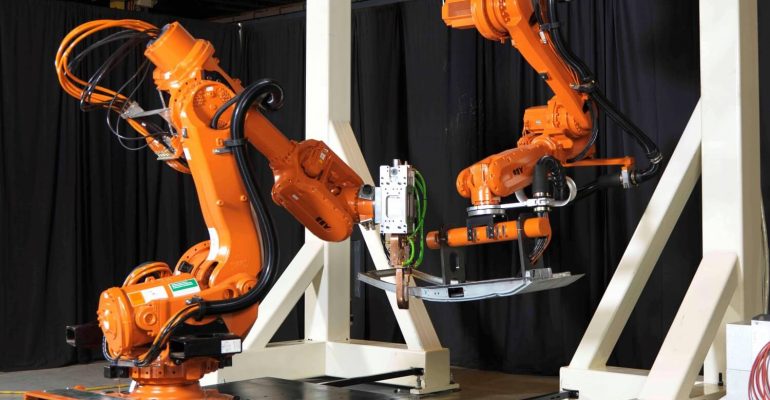 Б.
Б.
Вспомогательное оборудование роботизированных технологических комплексов [Текст] : учеб. пособие / Ю. Б. Ивацевич, Е. Б. Лаврентьев, Д. А. Носенков. — Ростов н/Д : ДГТУ, 2010. — 119 с. — Библиогр.: с. 117-118.
115. Д10-16/37411
Ивацевич, Ю. Б.
Роботизированные технологические комплексы сборки [Текст] : учеб. пособие / Ю. Б. Ивацевич, Е. Б. Лаврентьев ; Дон. гос. техн. ун-т. — Ростов н/Д : Изд. центр ДГТУ, 2016. — 127 с. : ил.
116. Д8-92/4865
Роботы и манипуляторы в экстремальных условиях [Текст] : материалы науч.-техн. конф., 21-22 мая / Под ред.Е.И.Юревича. — СПб. : [б. и.], 1992. — 116 с. : ил.
117. Д9-09/64965
Каляев, И. А.
Модели и алгоритмы коллективного управления в группах роботов [Текст] / И. А. Каляев, С. Г. Капустян. — М. : Физматлит, 2009. — 278 с. : ил.
118. Д9-05/14661
629/Ф 516
Филаретов, В. Ф.
Ф.
Устройства и системы управления подводных роботов [Текст] / В.Ф. Филаретов, А.В. Лебедев, Д.А. Юхимец. — М. : Наука, 2005. — 270 с. : ил.
119. Ж2-08/45092
Илларионов, Г. Ю.
Подводные роботы в минной войне [Текст] / Г. Ю. Илларионов, К. С. Сиденко, В. В. Сидоренко. — Калининград : Янтар. сказ, 2008 (Калининград). — 116 с. : ил. — Библиогр.: с. 115-116.
120. Д10-14/6283
629.5/А 163
Абраменко, Г. В.
Применение системного анализа при проектировании подводных робототехнических систем [Текст] / Г. В. Абраменко, Д. В. Васильков, А. И. Григорьев ; под ред. И. Н. Торгуна. — М. : ЦНИИХМ, 2014. — 237 с. : ил.
121. Ж2-13/56095
614.84/Г 671
Горбань, Ю. И.
Пожарные роботы и ствольная техника в пожарной автоматике и пожарной охране [Текст] / Ю. И. Горбань. — М. : Пожнаука, 2013. — 351 с. : ил.
122. Д10-14/8951
Корсунский, В. А.
Мобильные противопожарные и шахтные роботы [Текст] : учеб. пособие / В. А. Корсунский, В. Н. Наумов. — М. : Изд-во МГТУ им. Н. Э. Баумана, 2014. — 59 с. : ил.
123. Ж2-13/56029
629.33.05-52/629.33.05-52/
Автоматические и интеллектуальные системы транспортных средств. Автомобили и тракторы. Многоцелевые колесные и гусеничные машины. Наземные транспортно-технологические комплексы. Мобильные роботы и планетоходы [Текст] : учебник / Л. В. Барахтанов [и др.]; под общ. ред. В. Белякова, Л. Палковича. — 2-е изд., испр. и доп. — Н. Новгород ; Будапешт : Нижегор. гос. техн. ун-т им. Р. Е. Алексеева, 2013. — 474 с. : ил
124. Д9-11/92891
Автоматизированные мобильные комплексы обеспечения безопасности посадки воздушных судов [Текст] : учеб. пособие / В. В. Путов [и др.] ; Санкт-Петербургский гос. электротехнический ун-т. — СПб. : СПбГЭТУ «ЛЭТИ», 2011. — 119 с. : ил.
— СПб. : СПбГЭТУ «ЛЭТИ», 2011. — 119 с. : ил.
125. Д10-13/1335
Божкова, Л. В.
Автоматизация сборки изделий машиностроения с применением промышленных роботов и виброустройств [Текст] / Л. В. Божкова, М. В. Вартанов. — М. : Ун-т машиностроения, 2013. — 314 с.
126. Ж2-11/51712
621.791/К 492
Климов, А. С.
Роботизированные технологические комплексы и автоматические линии в сварке [Текст] : учеб. пособие / А. С. Климов, Н. Е. Машнин. — Изд. 2-е, испр. и доп. — СПб.[и др.] : Лань, 2011 (Киров). — 233 с. : ил
127. Д10-15/28881
621.791/Ш 786
Шолохов, М. А.
Траекторные задачи при автоматической и робототизированной сварке. Методы и алгоритмы решения, датчики, программно-аппаратные средства [Текст] / М. А. Шолохов ; под науч. ред. Э. А. Гладкова, Р. А. Покровского. — М. : МГТУ им. Н. Э. Баумана, 2015. — 168 с. : ил.
128. М/70985/1
М/70985/1
Металлообрабатывающие комплексы и робототехнические системы — перспективные направления научно-исследовательской деятельности молодых ученых и специалистов [Текст] : сб. науч. ст. II Междунар. науч.-техн. конф., 17-18 июня 2016 г. : в 2 т. / Рос. фонд фундам. исслед. [и др.] ; отв. ред. А. Н. Гречухин. — Курск : Юго-Зап. гос. ун-т, 2016 — .
Т. 1. — 2016. — 316 с. : ил. — Библиогр. в конце ст.
129. М/70985/2
Металлообрабатывающие комплексы и робототехнические системы — перспективные направления научно-исследовательской деятельности молодых ученых и специалистов [Текст] : сб. науч. ст. II Междунар. молодеж. науч.-техн. конф., 17-18 июня 2016 г. : в 2 т. / Рос. фонд фундам. исслед. [и др.] ; отв. ред. А. Н. Гречухин. — Курск : Юго-Зап. гос. ун-т, 2016 — .
Т. 2. — 2016. — 270 с. : ил. — Библиогр. в конце ст.
130. Д10-16/42270
Роботизированное фрезерование [Текст] : монография / В. А. Гречишников [и др.] ; Моск. гос. технол. ун-т «СТАНКИН». — М. : МГТУ «СТАНКИН», 2016. — 79 с. : ил.
А. Гречишников [и др.] ; Моск. гос. технол. ун-т «СТАНКИН». — М. : МГТУ «СТАНКИН», 2016. — 79 с. : ил.
131. Д10-17/45678
Бусурин, В. И.
Системы визуального управления автономными беспилотными летательными аппаратами морского базирования [Текст] / В. И. Бусурин, С. Ю. Желтов, П. С. Кудрявцев. — М. : Изд-во МАИ, 2017. — 159 с. : ил.
132. Н/21181/2
629.73/К 637
Комплексы с беспилотными летательными аппаратами [Текст] : [моногр. : в 2 кн.] / под ред. В. С. Вербы, Б. Г. Татарского ; АО «Концерн радиостроения «Вега». — М. : Радиотехника, 2016 — . — (Труды научных школ Акционерного общества «Концерн радиостроения «Вега»). — На обл.: Науч. сер. «Труды науч. шк. АО «Концерн «Вега». — До 2016 Издание см. под заглавием: Труды научных школ ОАО «Концерн радиостроения «Вега». .
Кн. 2(2016) : Робототехнические комплексы на основе БЛА. — 2016. — 821 с. : ил.
133. Д10-16/42252
Д10-16/42252
629.73/М 748
Моисеев, В. С.
Групповое применение беспилотных летательных аппаратов [Текст] : монография / В. С. Моисеев. — Казань : Школа, 2017. — 571 с. : ил.
134. М/70985/1
Металлообрабатывающие комплексы и робототехнические системы — перспективные направления научно-исследовательской деятельности молодых ученых и специалистов [Текст] : сб. науч. ст. II Междунар. науч.-техн. конф., 17-18 июня 2016 г. : в 2 т. / Рос. фонд фундам. исслед. [и др.] ; отв. ред. А. Н. Гречухин. — Курск : Юго-Зап. гос. ун-т, 2016 — .
Т. 1. — 2016. — 316 с. : ил. — Библиогр. в конце ст.
135. Д10-17/47478
Беспилотное транспортное средство с интеллектуальной системой диагностики и управления для условий Крайнего Севера и Арктики [Текст] : монография / Ю. Г. Кабалдин [и др.] ; [под ред. Ю. Г. Кабалдина]. — Н. Новгород : Нижегор. гос. техн. ун-т им. Р. Е. Алексеева, 2017. — 127 с.
Р. Е. Алексеева, 2017. — 127 с.
136. Д9-07/42055
Лещинский, В. П.
Конструирование роботов и манипуляторов [Текст] : учеб. пособие / В. П. Лещинский. — М. : Моск. гос. ин-т радиотехники, электроники и автоматики (техн. ун-т), 2007 (М.). — 118 с. : ил.
137. Ж2-18/62838
Салахова, А. А.
Конструируем роботов на Arduino. Умный замок [Текст] / А. А. Салахова. — М. : Лаб. знаний, 2018. — 57 с. : ил. — (Робофишки) (Робототехника. Инженерно-технические кадры инновационной России).
138. Ж2-16/60437
Бейктал, Д.
Конструируем роботов на Arduino: первые шаги [Текст] / Д. Бейктал ; пер. с англ. О. А. Трефиловой. — М. : Лаб. знаний, 2016. — 320 с. : ил. — (РОБОФИШКИ) (Робототехника: инженерно-технические кадры инновационной России).
139. Ж2-18/62730.
Бейктал, Дж.
Конструируем роботов. Дроны [Текст] : рук.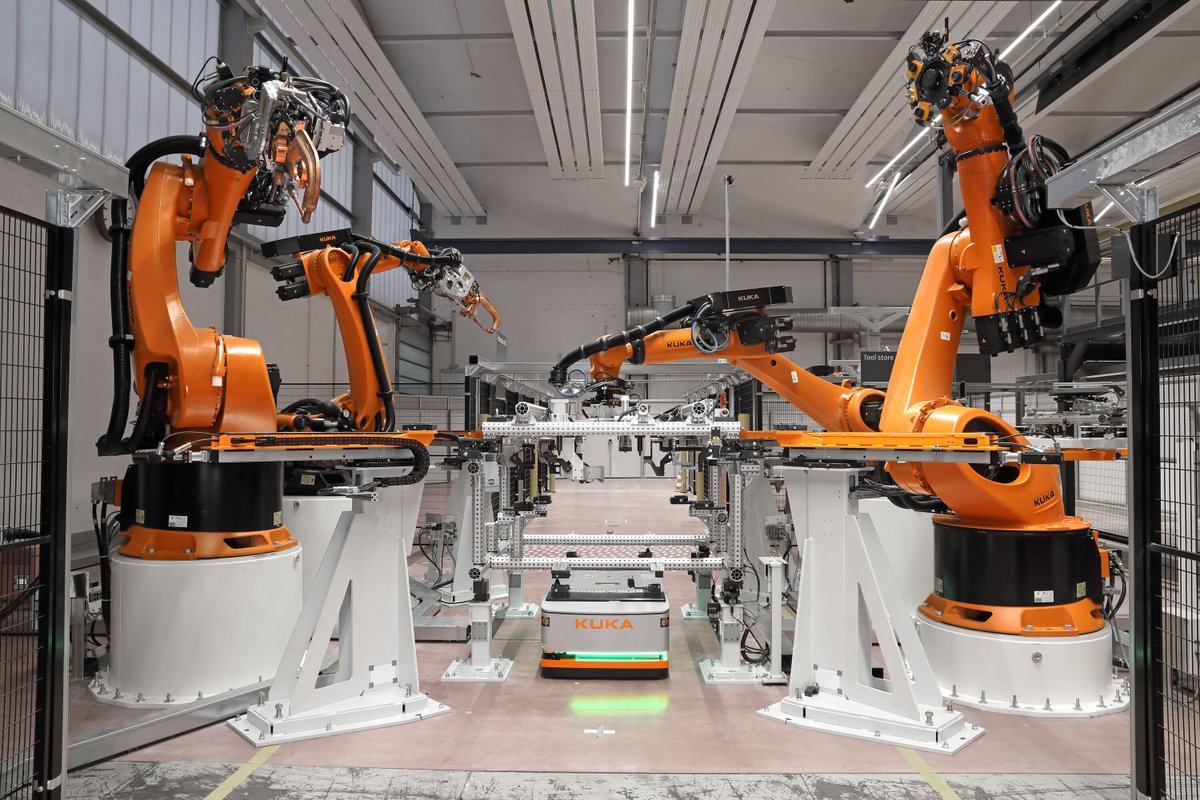 для начинающих / Дж. Бейктал ; пер. с англ. Ф. Г. Хохлова. — М. : Лаб. знаний, 2018. — 223 с. : ил.
для начинающих / Дж. Бейктал ; пер. с англ. Ф. Г. Хохлова. — М. : Лаб. знаний, 2018. — 223 с. : ил.
140. Ж2-18/62766
621.86/В 488
Винницкий, Ю. А.
Конструируем роботов на ScratchDuino®. Первые шаги [Текст] / Ю. А. Винницкий, К. Ю. Поляков. — 2-е изд. — М. : Лаб. знаний, 2018. — 116 с. : ил. — (Робофишки).
141. Д10-17/43448
Марочкина, С. В.
Конструируем и программируем с Lego Mindstorms EV3. «Марсианские миссии» [Текст] / С. В. Марочкина, Д. Б. Малахов. — М. : Эдитус, 2017. — 199 с.
142. J2/28148 MR-112392-10
Nehmzow, U.
Robot behaviour. Design, description, analysis and modelling [Text] / U. Nehmzow. — London [etc.] : Springer, 2009. — XVII, 252 p. : ill. — Библиогр.: с. 243-247.
143. R/11492/175/2
Problemy robotyki [Text] : сборник научных трудов / Politech. Warszawska; eds.: K. Tchon, C. Zielinski. — Warszawa : Wydaw. politech. Warszawskiej, 20 — . — ISSN 0137-2343.
Tchon, C. Zielinski. — Warszawa : Wydaw. politech. Warszawskiej, 20 — . — ISSN 0137-2343.
T. 2. — 2010. — IX, 724 s. : il. — (Elektronika: Prace naukowe, ISSN 0137-2343 ; z. 175). — Текст пол., англ. Рез. пол., англ. — Библиогр. в конце ст.
144. R/17544/266
Akademia gorniczo-hutnicza im. Stanislawa Staszica(Krakow).
Rozprawy monografie [Text] / Akademia gorniczo-hutnicza im. Stanislawa Staszica (Krakow). — Krakow : Wydaw. AGH, 19 — . — ISSN 0867-6631.
266 : Mobile robots — selected issues / T. Buratowski. — 2013. — 167 p. : ill.
145. R/18438/Vol.83 MR-113101-13
Springer tracts in advanced robotics — STAR [Text] : материалы временных коллективов / ed.: B. Siciliano, O. Khatib. — Tokyo [etc.] : Springer, 20 — . — ISSN 1610-7438.
Vol.83 : Distributed autonomous robotic systems : the 10th intern symp. / ed. A. Martinoli [et al.] ; International symposium on distributed autonomous robotic systems (10; 2010; Geneva). — 2013. — XXIII, 612 p.
— 2013. — XXIII, 612 p.
146. R/18438/81 MR-113102-13
Springer tracts in advanced robotics — STAR [Text] / ed.: B. Siciliano, O. Khatib. — Tokyo [etc.] : Springer, 20 — . — ISSN 1610-7438.
Vol. 81 : Multi-locomotion robotic systems : new concepts of bio-inspired robotics / T. Fukuda [et al.]. — 2012. — XIII, 312 p. : ill.
147. R/18438/77 MR-113103-13
Springer tracts in advanced robotics — STAR [Text] / ed.: B. Siciliano, O. Khatib. — Tokyo [etc.] : Springer, 20 — . — ISSN 1610-7438.
Vol. 77 : Self-organizing robots / S. Murata, H. Kurokawa. — 2012. — XVIII, 252 p. : ill. — Библиогр. в конце глав.
148. R/11430/244
Mechanika [Text] : pr. naukowe / Politechnika Warszawska. — Warszawa : Offic. wydaw. politech. Warszawskiej, 19 — . — ISSN 0137-2335.
z. 244 : Analiza i synteza systemow sterowania glosowego w zautomatyzowanym wytwarzaniu / A. Rogowski. — 2012. — 140 c. : il. — Библиогр.: с. 130-13.
Rogowski. — 2012. — 140 c. : il. — Библиогр.: с. 130-13.
Журналы и журнальные статьи
149. Шифр: У4580
Робототехника и техническая кибернетика [Текст] : науч.-техн. журн./ Центр. науч.-исслед. и опыт.-конструкт. ин-т робототехники и техн. кибернетики (ЦНИИ РТК). — СПб. : ЦНИИ РТК, 2013 — (СПб.). — Журн. вкл. в Перечень ВАК РФ. — Журн. вкл. в РИНЦ. — Выходит ежеквартально.
150. Шифр: У3195
Популярная механика [Текст] = Popular Mechanics. — М. : Премиум Паблишинг, 2002 — . — До 2016 г. изд-во:»Фэшн Пресс», ООО. — Выходит ежемесячно
151. Шифр: У3181
Саратовский гос. технический ун-т.
Вестник Саратовского государственного технического университета [Текст] : науч.-техн. журн./ Сарат. гос. техн. ун-т. — Саратов : СГТУ, 2003 — . — Журн. вкл. в Перечень ВАК РФ. — Выходит ежеквартально. — ISSN 1999-8341
Вестник Магнитогорского государственного технического университета им. Г. И. Носова [Текст] : журн./ Магнитогорский гос. технический ун-т им. Г. И. Носова. — Магнитогорск
Г. И. Носова [Текст] : журн./ Магнитогорский гос. технический ун-т им. Г. И. Носова. — Магнитогорск
152. Шифр: У1948
Тамбовский гос. ун-т им. Г. Р. Державина.
Вестник Тамбовского университета [Текст] : науч.-теоретич. и практ. журн. Серия, Естественные и технические науки/ Тамбов. гос. ун-т им. Г. Р. Державина. — Тамбов : [б. и.], 1996 — . — В подзаг.: до 2002 г. Науч.-теорет. журн. — Журн. вкл. в Перечень ВАК РФ. — Выходит раз в два месяца. —
153. Шифр: У1389
В мире науки [Текст] = Scientific American : ежемес. науч.-информ. журн. Русскояз. версия Scientific American/ «Международное партнерство распространения научных знаний», некоммерч. партнерство. — М. : «Международное партнерство распространения научных знаний», некоммерч. партнерство, 1983 — (М.). — в 1995-2002 гг. журн. не издавался. — До 2014 г. изд-во: Российский новый ун-т. — Выходит ежемесячно. — ISSN 0208-0621
154. Черепанов П.Ю., Романов П.А.
Основные направления развития робототехники [Текст] //П.Ю.Черепанов, п.А.Романов// Современные инновации/- 2017. -№1. –С.29-38.
(Шифр в БД Р3745)
155. Софьин, А. П.
Условия использования роботов в околоземном пространстве [Текст] / А. П. Софьин, Л. А. Федорова, М. В. Ведерников // Экология и развитие о-ва. — 2016. — N 3. — С. 57-63.
(Шифр в БД У4181/2016/3)
156. Воробьев Е.И., Дорофеев В.О.
Расчет усилий поступательных приводов при реализации ориентирующих движений схвата манипулятороа. [Текст] //Е.И.Воробьев, В.О.Дорофеев// Сборка в машиностроении, приборостроении/ -2015. -№7. –С.42-45.
(Щифр в БД У2496)
157. Килин А.А., Караваев Ю.Л.
Экспериментальные исследования динамики сферического робота комбинированного типа. [Текст] //А.А.Килин, Ю.Л.Караваев// Нелинейная динамика/ -2015. -Т.11, №4. –С.721-734.
(Шифр в БД У4114)
158. Глазунов В.А., Гаврилина Л.В., Духов А.В., Терехова А.Н.
Информационный аспект сотрудничества института машиноведения им. А.А.Благонравова РАН с национальным центром научных исследований (Франция) и перспективы развития медицинской робототехники [Текст]//В.А.Глазунов, Л.В.Гаврилина, А.В.Духов, А.Н.Терехова// Информация и связь/ -2013. -№4. –С.39-42.
(Шифр в БД У2524)
159. Перегудова О.А., Макаров Д.С
Синтез управления двухзвенным манипулятором [Текст]//О.А.Перегудова, Д.С.Макаров// Автоматизация управления/ -2014. -№4(38). –С.36-41.
(Шифр У2999)
160. Петрина, А. М.
Успехи робототехники (Обзор) [Текст] / А. М. Петрина // Научно-техническая информация. Сер.2, Информационные процессы и системы / ВИНИТИ. — 2011. — N 3. — С. 1-16.
(Шифр в БД У1155/2011/3)
161. Тараканов, В. П.
Роботизированная образовательная среда современной гуманитарной академии [Текст] / В. П. Тараканов // Вестн. Рос. акад. естеств. наук. — 2013. — Т. 13, № 1. — С. 58—66. — Библиогр.: 2 назв.
(Шифр в БД У2937/2013/13/1)
162. Софьин, А. П.
Условия использования роботов в околоземном пространстве [Текст] / А. П. Софьин, Л. А. Федорова, М. В. Ведерников // Экология и развитие о-ва. — 2016. — N 3. — С. 57-63. — Библиогр.: 4 назв.
(Шифр в БД У4181/2016/3)
163. Зезюлин, Д. В.
Мониторинг прибойной зоны с использованием модульных амфибийных транспортных средств [Текст] / Д. В. Зезюлин, В. С. Макаров, М. Р. Коленик // Экологические системы и приборы. — 2016. — N 8. — С. 18-22. — Библиогр.: 16 назв.
(Шифр в БД У2316/2016/8)
164. Шифр: W9572
Robotics <and >Autonomous Systems [Текст]. — Amsterdam : [б. и.], 1985 — . — ISSN 0921-8890
165. Шифр: V4982
National research institute <of >fire <and >disaster (Tokyo).
Report <of >National Research Institute <of >Fire <and >Disaster [Text]. — Tokyo : National Research Institute of Fire and Disaster, 1996 — . — Выходит дважды в год. — ISSN 0426-2700
Электронные ресурсы
166. Robotica [Electronic resource]. — Electronic text data. — Cambridge : Cambridge University Press, 1983 — . — on-line. — Журн. доступен с 1983 г. — Режим доступа : http://journals.cambridge.org/action/displayJournal?jid=ROB (journal link (full text — компьютерный зал)). — Загл. с экрана. — Выходит 8 раз в год. — ISSN 1469-8668
Параллельные издания: Robotica : Cambridge University Press. — ISSN 02635747
167. vr=R419211
Russian Engineering Research [Электронный ресурс] . — Electronic text data. — Heidelberg : Springer-RL-Verl. : Allerton Press. — Режим доступа : http://www.springer.com (publisher’s website). — Загл. с титул. экрана. — Режим доступа : http://www.springerlink.com/content/1068-798X (journal link (full text — НТО-3)). — Выходит ежемесячно. — ISSN 1068-798X
168. vr=C279163
Computational Complexity [Электронный ресурс] . — Electronic text data. — 1991 — . — Basel : Birkhauser Verlag, Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. (061-2717400). — Режим доступа : http://www.springer.com (publisher’s website). — Загл. с титул. экрана. — Режим доступа : http://www.elibrary.ru (database website Elibrary 1998 — 2004 с 2005г. см. издательство Springer). — Режим доступа : http://www.springerlink.com/content/101499 (journal link (full text — НТО-3)). — ISSN 1016-3328
169. vr=I664081
Instrumentation Science & Technology [Electronic resource]. — Electronic text data. — London [etc.] : Taylor & Francis group, 1968 — . — on-line. — Журн. доступен с 1968 г. — Режим доступа : http://www.tandfonline.com/toc/list20/current. — Загл. с экрана. — Выходит раз в два месяца. — ISSN 1525-6030
170. vr=A807958
Algebras and Representation Theory [Электронный ресурс] . — Electronic text data. — Berlin : Springer Science+Business Media (Springer). — Режим доступа : http://www.springer.com (publisher’s website). — Загл. с титул. экрана. — Режим доступа : http://www.ingentaconnect.com/content/klu/alge (database website Ingenta). — Режим доступа : http://www.springerlink.com/content/102843 (journal link (full text — НТО-3)). — Выходит ежеквартально. — ISSN 1386-923X
171. vr=A660094
Autunomous Robots [Электронный ресурс] . — Electronic text data. — Berlin : Springer Science+Business Media, 1994 — (Springer). — Режим доступа : http://www.elibrary.ru (database website Elibrary 1996 — 2004 с 2005г. см. издательство Springer). — Загл. с титул. экрана. — Режим доступа : http://www.springer.com (publisher’s website). — Режим доступа : http://www.kluweronline.com/issn/0929-5593 (journal link (full text — НТО-3)). — Выходит ежеквартально. — ISSN 0929-5593
172. vr=M675945
Multibody System Dynamics [Электронный ресурс] . — Electronic text data. — Berlin : Springer Science+Business Media, 1997 — (Springer). — Режим доступа : http://www.elibrary.ru (database website Elibrary 1997 — 2004 с 2005г. см. издательство Springer). — Загл. с титул. экрана. — Режим доступа : http://www.springer.com (publisher’s website). — Режим доступа : http://www.springerlink.com/content/100318 (journal link (full text — НТО-3)). — Выходит ежеквартально. — ISSN 1384-5640
научно-технический журнал
173. vr=C364347
Computer-Aided Civil and Infrastructure Engineering [Электронный ресурс] . — Electronic text data. — [Б. м.] : John Wiley & Sons, Inc., 1998 — (Ulrich). — Режим доступа : http://eu.wiley.com (publisher’s website). — Загл. с титул. экрана. — Режим доступа : http://search.ebscohost.com (database website Science & Technology Collection). — Режим доступа : http://www3.interscience.wiley.com/journal/118514357/toc?func=showIssues&code=mice (journal link ). — Выходит раз в два месяца. — ISSN 1093-9687
174. vr=J543236
Journal of Machinery Manufacture and Reliability [Электронный ресурс] . — Electronic text data. — Heidelberg : Springer-RL-Verl. : Allerton Press. — Режим доступа : http://www.springer.com (publisher’s website). — Загл. с титул. экрана. — Режим доступа : http
175. vr=R419211
Russian Engineering Research [Электронный ресурс] . — Electronic text data. — Heidelberg : Springer-RL-Verl. : Allerton Press. — Режим доступа : http://www.springer.com (publisher’s website). — Загл. с титул. экрана. — Режим доступа : http://www.springerlink.com/content/1068-798X (journal link (full text — НТО-3)). — Выходит ежемесячно. — ISSN 1068-798X
176. vr=O261241
Optimization and Engineering [Электронный ресурс] . — Electronic text data. — Berlin : Springer Science+Business Media, 2000 — (Springer). — Режим доступа : http://www.springer.com (publisher’s website). — Загл. с титул. экрана. — Режим доступа : http://www.springerlink.com/content/105609 (journal link (full text — НТО-3)). — Выходит ежеквартально. — ISSN 1389-4
177. Haikonen, P. O.
Robot brains [Electronic resource] : circuits and systems for conscious machines / P. O. Haikonen. — Electronic text
data. — Chichester : John Wiley & Sons, 2007. — on-line. — Режим доступа: http://www3.interscience.wiley.com/cgi-bin/bookhome/116841399. — Загл. с титул. экрана. — ISBN 978-0-470-51787-1
178. Haun, M.
Handbuch Robotik [Electronic resource] : Programmieren und Einsatz intelligenter Roboter / M. Haun. — Electronic text data. — Berlin ; Heidelberg : Springer, 2007. — on-line. — (VDI-Buch). — Режим доступа: http://dx.doi.org/10.1007/978-3-540-36918-9. — ISBN 978-3-540-36918-9
179. Milford, M. J.
Robot navigation from nature [Electronic resource] : simultaneous localisation, mapping, and path planning based on hippocampal models / M. J. Milford. — Electronic text data. — Berlin ; Heidelberg : Springer-Verlag, 2008. — on-line. (Springer tracts in advanced robotics, ISSN 1610-7438 ; 41). — Режим доступа: http://dx.doi.org/10.1007/978-3-540-77520-1. — ISBN 978-3-540-77520-1
180. Scholz, M. P.
Advanced NXT [Electronic resource] : the Da Vinci inventions book / M. P. Scholz. — Electronic text data. — Berkeley, Ca : Apress, 2007. — on-line — Режим доступа: http://dx.doi.org/10.1007/978-1-4302-0258-5. — ISBN 978-1-4302-0258-5
181. Sridharan, K.
Robotic exploration and landmark determination [Electronic resource] : hardware-efficient algorithms and FPGA implementations / K. Sridharan, P. R. Kumar. — Electronic text data. — Berlin ; Heidelberg : Springer-Verlag, 2008. — on-line — (Studies in computational intelligence, ISSN 1860-949X ; 81). — Режим доступа: http://dx.doi.org/10.1007/978-3-540-75394-0. — ISBN 978-3-540-75394-0
182. Nehmzow, U.
Robotica mobile [Electronic resource] : un-introduzione pratica / U. Nehmzow. — Electronic text data. — Milano : Springer-Verlag, 2008. — on-line. — (Unitext, collana di informatica). — Режим доступа: http://dx.doi.org/10.1007/978-88-470-0386-6. — ISBN 978-88-470-0386-6
183. Buehler, M.
The DARPA urban challenge [Electronic resource] : autonomous vehicles in city traffic / M. Buehler, K. Iagnemma, S. Singh. — Electronic text data. — Berlin ; Heidelberg : Springer, 2009. — on-line. — (Springer tracts in advanced robotics, ISSN 1610-7438 ; 56). — Режим доступа: http://dx.doi.org/10.1007/978-3-642-03991-1. — ISBN 978-3-642-03991-1
184. Ulivi, P.
Robotic exploration of the solar system [Электронный ресурс] : part 2: hiatus and renewal 1983-1996 / P. Ulivi, D. M. Harland. — Electronic text data. — New York, NY : Praxis publ., 2009. — on-line. — (Springer Praxis Books) — Режим доступа: http://dx.doi.org/10.1007/978-0-387-78905-7. — ISBN 978-0-387-78905-7
185. Stachniss, C.
Robotic mapping and exploration [Electronic resource] / C. Stachniss. — Electronic text data. — Berlin ; Heidelberg : Springer, 2009. — on-line. — (Springer tracts in advanced robotics) , ISSN 1610-7438 ; 55). — Режим доступа: http://dx.doi.org/10.1007/978-3-642-01097-2. — ISBN 978-3-642-01097-2
186. Rollins, M.
Practical LEGO Technics. Bring your LEGO creations to life [Electronic resource] / M. Rollins. — Electronic text data. — New York, NY [etc.] : Apress, 2013. — on-line. — Режим доступа: http://link.springer.com/book/10.1007/978-1-4302-4612-1. — Загл. с экрана. — ISBN 978-1-4302-4612-1
187. Rollins, M.
LEGO technic robotics [Electronic resource] : design and build custom LEGO bots with LEGO technic / M. Rollins. — Electronic text data. — New York, NY [etc.] : Apress, 2013. — on-line. — (Technology in Action). — Режим доступа: http://link.springer.com/book/10.1007%2F978-1-4302-4981-8. — Загл. с экрана. — ISBN 978-1-4302-4981-8
188. _Gogu, G.
Structural synthesis of parallel robots [Electronic resource] : Pt 2: Translational topologies with two and three degrees of freedom / G. Gogu, G. M. Gladwell. — Electronic text data. — Dordrecht : Springer, 2009. — on-line. — (Solid mechanics and its applications, ISSN 0925-0042 ; 159). — Режим доступа: http://dx.doi.org/10.1007/978-1-4020-9794-2. — ISBN 978-1-4020-9794-2
189. Design and control of intelligent robotic systems [Electronic resource] / ed. D. Liu [et al.]. — Electronic text data. — Berlin ; Heidelberg : Springer, 2009. — on-line. — (Studies in computational intelligence, ISSN 1860-949X ; 177- ISSN 1860-949X ; 177). — Режим доступа: http://dx.doi.org/10.1007/978-3-540-89933-4. — ISBN 978-3-540-89933-4
190. Song, D.
Sharing a vision [Electronic resource] : systems and algorithms for collaboratively-teleoperated robotic cameras / D. Song. — Electronic text data. — Berlin ; Heidelberg : Springer, 2009. — on-line. — (Springer tracts in advanced robotics, ISSN 1610-7438 ; 51).
191. Duindam, V.
Modeling and control for efficient bipedal walking robots [Electronic resource] : a port-based approach / V. Duindam, S. Stramigioli. — Electronic text data. — Berlin ; Heidelberg : Springer, 2009. — on-line. — (Springer tracts in advanced robotics, ISSN 1610-7438 ; 53). — Сведения доступны также по Интернету: .
_
192. Nuchter, A.
3D robotic mapping [Electronic resource] : the simultaneous localization and mapping problem with six degrees of freedom / A. Nuchter. — Electronic text data. — Berlin ; Heidelberg : Springer, 2009. — on-line. — (Springer tracts in advanced robotics,
193. Dynamical systems, wave-based computation and neuro-inspired robots [Electronic resource] / ed. P. Arena. — Electronic text data. — Vienna : Springer, 2008. — on-line. — (CISM international centre for mechanical sciences, ISSN 0254-1971 ; 500). —
194. Fahimi, F.
Autonomous robots [Electronic resource] : modeling, path planning, and control / F. Fahimi. — Electronic text data. — Boston, Ma : Springer Science + Business Media LLC, 2009. — on-line.
195. Trianni, V.
Evolutionary swarm robotics [Electronic resource] : evolving self-organising behaviours in groups of autonomous robots / V. Trianni. — Electronic text data. — Berlin ; Heidelberg : [s. n.], 2008. — on-line.
196. Milford, M. J.
Robot navigation from nature [Electronic resource] : simultaneous localisation, mapping, and path planning based on hippocampal models / M. J. Milford. — Electronic text data. — Berlin ; Heidelberg : Springer-Verlag, 2008. — on-line.
197. Autonomous robots and agents [Electronic resource] / ed.: S. C. Mukhopadhyay, G. S. Gupta. — Electronic text data. — Berlin ; Heidelberg : Springer, 2007. — on-line. — (Studies in computational intelligence, ISSN 1860-949X ; 76). — Сведения доступны также по Интернету: .
198. Robotics and cognitive approaches to spatial mapping [Electronic resource] / ed. : M. E. Jefferies, W. Yeap. — Electronic text data. — Berlin ; Heidelberg : Springer-Verlag, 2008. — on-line. — (Springer tracts in advanced robotics, ISSN 1610-7438 ; 38). — Сведения доступны также по Интернету: .
199. Kelly, R.
Control of robot manipulators in joint space [Electronic resource] / R. Kelly, V. S. Davila, A. Loria. — Electronic text data. — London : Springer, 2005. — on-line. — (Advanced textbooks in control and signal processing, ISSN 1439-2232). — Сведения доступны также по Интернету:
200. Armada, M. A.
Climbing and walking robots [Electronic resource] : proceedings of the 7th international conference CLAWAR 2004 / M. A. Armada, P. Gonzalez Santos. — Electronic text data. — Berlin ; Heidelberg : Springer, 2005. — on-line. — Режим доступа: http://dx.doi.org/10.1007/3-540-29461-9. — ISBN 3-540-29461-9
201. Florczyk, S.
Robot vision [Electronic resource] : video-based indoor exploration with autonomous and mobile robots / S. Florczyk. — Electronic text data. — Weinheim [etc.] : Wiley-VCH Verl., 2006. — on-line. — — Режим доступа: http://library.gpntb.ru/books/book.php?book=9783527604913. — Загл. с титул. экрана. — ISBN 978-3-527-60491-3
202. ODP/133/244
Mechanika [Electronic resource] : pr. naukowe / Politech. Warszawska. — Электрон. текстовые дан. — Warszawa : Oficyna wydaw. politech. Warszawskiej
z. 244 : Analiza i synteza systemow sterowania glosowego w zautomatyzowanym wytwarzaniu / A. Rogowski. — 2012. — 1 электрон. опт. диск (CD-ROM)
203. <The >Robotics Divide. A New Frontier in the 21st Century? [Electronic resource] / ed. A. L. Peláez. — Electronic text data. — London : Springer-Verl., 2014. — on-line. — Режим доступа: https://link.springer.com/book/10.1007%2F978-1-4471-5358-0. — Загл. с экрана. — ISBN 978-1-4471-5358-0.
2.1: Что такое робототехника?
Робот — это программируемое механической устройство, способное выполнять задачи и взаимодействовать с внешней средой без помощи со стороны человека. Робототехника — это научная и техническая база для проектирования, производства и применения роботов.
Слово «робот» было впервые использовано чешским драматургом Карлом Чапеком в 1921. В его произведении «Универсальные роботы Россума» речь шла о классе рабов, искусственно созданных человекоподобных слуг, сражающихся за свою свободу. Чешское слово «robota» означает «принудительное рабство». Слово «робототехника» было впервые применено известным автором научной фантастики Айзеком Азимовым в 1941 году.
Базовые компоненты робота
Компоненты робота: тело/рама, система управления, манипуляторы, и ходовая часть.
Тело/рама: Тело, или рама, робота может иметь любую форму и размер. Изначально, тело/рама обеспечивает конструкцию робота. Большинство людей знакомы с человекоподобными роботами, используемыми для съемок кинофильмов, но в действительность большинство роботов не имеют ничего общего с человеческим обликом. (Робонафт НАСА, представленный в предыдущем разделе, является исключением). Как правило, в проекте робота внимание уделяется функциональности, а не внешности.
Система управления: Система управления робота является эквивалентом центральной нервной системы человека. Она предназначена для координирования управления всеми элементами робота. Датчики реагируют на взаимодействие робота с внешней средой. Ответы датчиков отправляются в центральный процессор (ЦП). ЦП обрабатывает данные с помощью программного обеспечения и принимает решения на базе логики. То же самое происходит при вводе пользовательской команды.
Манипуляторы: Для выполнения задачи большинство роботов взаимодействует с внешней средой, а также окружающим миром. Иногда требуется перемещение объектов внешней среды без непосредственного участия со стороны операторов. Манипуляторы не являются элементом базовой конструкции робота, как его тело/рама или система управления, то есть робот может работать и без манипулятора. В настоящем учебном курсе акцент делается на тему манипуляторов, особенно блок 6.
Ходовая часть: Хотя некоторые роботы могут выполнять поставленные задачи, не изменяя свое местоположение, зачастую от роботов требуется способность перемещаться из одного места в другое. Для выполнения данной задачи роботу необходима ходовая часть. Ходовая часть представляет собой приводное средство перемещения. Роботы-гуманоиды оснащены ногами, тогда как ходовая часть практически всех остальных роботов реализована с помощью колес.
Возможности применения и примеры роботов
На сегодняшний день, роботы имеют массу применений. Области применения делятся на три основные категории:
- промышленные роботы;
- исследовательские роботы;
- образовательные роботы.
Промышленные роботы
В промышленности, для выполнения огромного количества работ необходимы высокая скорость и точность. В течение многих лет ответственность за выполнение подобных работ несли люди. С развитием технологий, использование роботов позволило ускорить и повысить точность многих производственных процессов. Это и упаковка, сборка, окраска и укладка на поддоны. Изначально, роботы выполняли только особые виды повторяющихся работ, где требовалось соблюдение простого заданного набора правил. Тем не менее, с развитием технологий промышленные роботы стали гораздо более подвижны, и теперь они способны принимать решения на основе сложного ответа от датчиков. Сегодня промышленные роботы часто оснащены системами технического зрения. К концу 2014 года международная робототехническая федерация прогнозировала объем применения промышленных роботов по всему миру свыше 1,3 миллиона единиц!
Роботы могут использоваться для выполнения сложных, опасных задач, а также задач, которые человек выполнить не в состоянии. Например, роботы способны обезвреживать бомбы, обслуживать ядерные реакторы, исследовать глубины океана и достигать самых дальних уголков космоса.
Исследовательские роботы
Роботы имеют широкое применение в мире исследований, так как их часто используют для выполнения задач, в решении которых человек беспомощен. Наиболее опасные и сложные среды находятся под поверхностью Земли. В целях изучения космического пространства и планет солнечной системы в НАСА на протяжении использовались космические аппараты, посадочные модули и вездеходы с функциями роботов.
Роботы Pathfinder и Sojourner
Для марсианской миссии Pathfinder была разработана уникальная технология, позволяющая осуществить доставку оборудованного посадочного модуля и роботизированного вездехода, Sojourner, на поверхность Марса. Sojourner был первым вездеходом, отправленным на планету Марс. Масса вездехода Sojourner на поверхности земли составляет 11 кг (24,3 фунта), на поверхности Марса — прибл. 9 фунтов, а его размеры сопоставимы с размерами детской коляски. Вездеход имеет шесть колес и может перемещаться со скоростью до 0,6 метров (1,9 футов) в минуту. Миссия была запущена на поверхности Марса 4 июля 1997 года. Pathfinder не только выполнил свою прямую задачу, но также вернулся на Землю с огромным количеством собранных данных и превысил свой проектный срок эксплуатации.
Вездеходы Spirit и Opportunity
Марсианские исследовательские вездеходы (MER) Spirit и Opportunity были отправлены на Марс летом 2003 года и приземлились в январе 2004 года. Их миссия состояла в исследовании и классификации большого количества камней и почв с целью обнаружения остатков воды на Марсе, в надежде на отправку на планету человеческой миссии. Несмотря на то, что запланированная длительность миссии составляла 90 дней, в действительности она превысила шесть лет. За это время было собрано бесчисленное количество геологических данных о Марсе.
Роботизированная рука космического корабля
Когда проектировщики НАСА впервые приступили к проектированию космического корабля, они столкнулись с задачей, выраженной в необходимости безопасной и эффективной доставки в космическое пространство огромного, но, к счастью, невесомого объема груза и оборудования. Система дистанционного манипулирования (RMS), или Канадарм (канадский дистанционный манипулятор), совершила свой первый выход в космос 13 ноября 1981 года.
Рука имеет шесть подвижных соединений, имитирующих человеческую руку. Два соединения расположены в плече, одно — в локте, и еще три — в кисти. На конце кисти установлено захватное устройство, способное захватывать или зацеплять требуемый груз. В условиях невесомости рука способна поднимать 586 000 фунтов груза и выполнять их размещение с удивительной аккуратностью. Общая масса руки на поверхности Земли составляет 994 фунта.
RMS использовалась для запуска и поиска спутников, а также оказалась бесценным помощником для астронавтов в процессе ремонта космического телескопа Хаббла. Последняя миссия Канадарм в составе космического корабля стартовала в июле 2011 года и стала девяностой миссией этого робота.
Мобильные обслуживающие системы
Мобильная обслуживающая система (MSS) представляет собой систему, аналогичную RMS, и известна также как Канадарм 2. Система была спроектирована для установки на международной космической станции в качестве объектного манипулятора. MSS предназначена для обслуживания оборудования и приборов, установленных на международной космической станции, а также для оказания помощи при транспортировке продовольствия и оборудования в пределах станции.
Dextre
В рамках космической миссии STS-123 в 2008, космический корабль Endeavor осуществлял перевозку последней части гибкого манипулятора специального назначения Dextre.
Dextre — это робот, оснащенный двумя не большими руками. Робот способен выполнять задачи по точной сборке, которые до этого выполняли астронавты во время входа в открытый космос. Dextre может транспортировать объекты, пользоваться инструментами и осуществлять установку или удаление оборудования на космической станции. Dextre также оснащен освещением, видео-оборудованием, инструментальной базой, а также четырьмя держателями для инструментов. Датчики позволяют роботу «чувствовать» объекты, с которыми он имеет дело, и автоматически реагировать на движения или изменения. Команда может наблюдать за работой с помощью четырех установленных камер.
По конструкции робот напоминает человека. Верхняя часть его тела может поворачиваться в талии, а плечи удерживают руки, расположенные с двух сторон.
Роботы в образовании
Робототехника стала увлекательным и доступным инструментом обучения и поддержки STEM, проектирования и подходов к решению задач. В робототехнике, учащиеся получают возможность реализовать себя в роли проектировщиков, артистов и техников одновременно, используя собственные руки и голову. За счет этого открываются огромные возможности применения научных и математических основ.
В современной системе образования, с учетом финансовых ограничений, средние и высшие школы находятся в постоянном поиске экономически выгодных путей преподавания сложных программ, сочетающих технологии с множеством дисциплин, учащимся для их подготовки к профессиональной деятельности. Преподаватели сразу видят преимущества робототехники и данного учебного курса, так как в них реализован межпредметный метод сочетания различных дисциплин. В дополнение, робототехника предлагает наиболее доступное и подходяще для повторного использования оборудование.
Сегодня более чем когда либо, школы применяют робототехнические программы в классе для «оживления» учебных курсов и обеспечения соответствия широкому спектру академических стандартов, необходимых для учащихся. Робототехника не только является уникальной и широкой базой для преподавания разнообразных технических дисциплин, но также областью техники, оказывающей значительное влияние на развитие современного общества.
Почему робототехника важна?
Как видно из раздела «Возможности применения и примеры роботов», робототехника является новой областью техники, применяемой во многих сферах жизни человека. Важным фактором развития общества является образованность всех его членов в части существующих технологий. Но это не единственная причина возрастающей значимости робототехники. Робототехника уникальным образом сочетает в себе основы дисциплин STEM (естественные науки, технологии, инженерия и математика). В процессе обучения в классе учащиеся изучают различные дисциплины и их взаимосвязи, используя современные, технологичные и увлекательные инструменты. Помимо этого, визуальное представление проектов, которое требуется от учащи, стимулирует их к экспериментам и проявлению изобретательности в процессе поиска эстетичных и работоспособных решений. Комбинируя эти аспекты работы, учащиеся поднимают свои знания и возможности на новый уровень.
как в России развивается социальная робототехника
Современные технологии постепенно проникают в нашу жизнь, становясь неотъемлемой ее частью. В последнее время без робототехники уже немыслим практически ни один производственный процесс, но с каждым годом техника становится все более ориентированной на конкретного человека. Дорожная карта «Компоненты робототехники и сенсорика» нацпроекта «Цифровая экономика» предполагает, что в 2024 году на глобальном рынке будет внедрено 15 уникальных российских разработок сервисной робототехники в системах массового обслуживания, в том числе в социальной сфере, ретейле, маркетинге. Как технологии и роботы появляются в повседневной жизни человека, выяснял корреспондент портала «Будущее России. Национальные проекты», оператором которого является информационное агентство ТАСС.
Кто такой социальный робот?
В общем смысле понятие «социальный робот» объединяет в себе всех роботов, способных взаимодействовать с человеком, хотя разные эксперты и производители могут давать разные определения этого термина и предлагать собственную классификацию таких устройств.
Как рассказал порталу руководитель направления «Робототехника и искусственный интеллект» кластера информационных технологий Фонда «Сколково» Павел Кривозубов, к социальным роботам, в частности, относятся роботы-промоутеры, которые могут заменить человека, например в банке или госучреждении, давая консультации посетителям. Кроме того, это роботы телеприсутствия, с помощью которых люди, в том числе с ограниченными возможностями здоровья, могут не выходя из дома получить доступ к участию в удаленных конференциях, просмотру концертов или шоу по всему миру.
Еще одно направление — разнообразные личные роботы-компаньоны, которые используются в качестве игрушки и при этом способны взаимодействовать с ребенком, рассказывать сказки, давать советы, поднимать настроение. К социальным роботам можно отнести и различные системы на основе искусственного интеллекта, такие как, например, «Яндекс.Станция» с голосовым помощником Алисой.
Домашняя мультимедиа-платформа «Яндекс. Станция» с голосовым помощником «Алиса»
Станислав Красильников/ТАСС
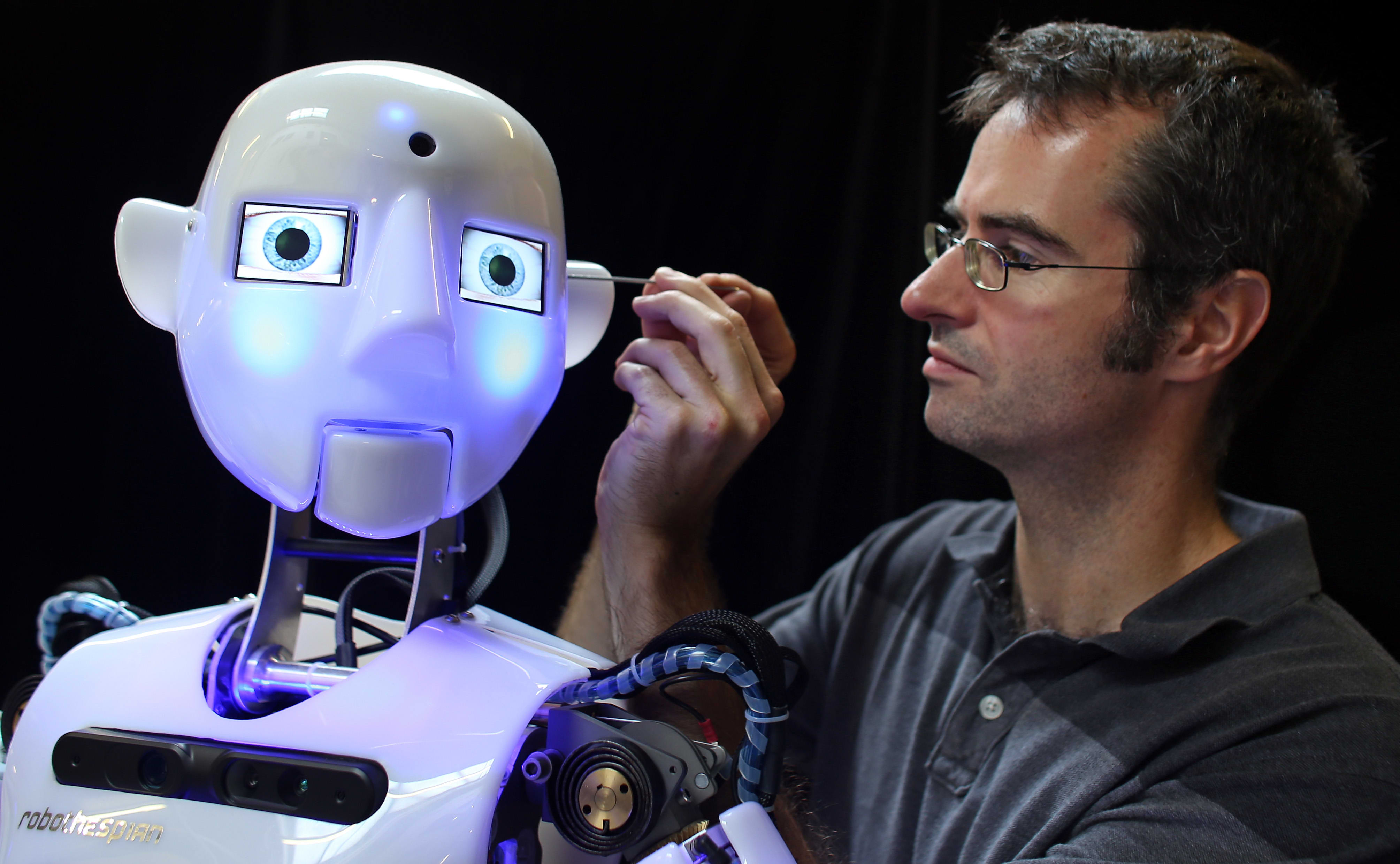
«Социальность» робота может проявляться просто голосом, а может — мимикой, жестами и поведением. То есть, с точки зрения внешнего вида, такие устройства могут и в какой-то степени напоминать человека или животное, и иметь определяющийся исключительно функциональностью форм-фактор, и вовсе не обладать «физической оболочкой», как программные роботы-боты.
«Дизайн играет значительную роль в робототехнике, так как вносит основной вклад в то впечатление, которое складывается у пользователя. А вопрос взаимодействия человека и робота сейчас является одним из ключевых для исследователей и производителей, так как от этого зависит, насколько роботы смогут интегрироваться в нашу жизнь и стать ее полноправным участником», — считает исполнительный директор Национальной ассоциации участников рынка робототехники (НАУРР) Алиса Конюховская.
Конечно, многие люди, благодаря кинематографу и литературе, когда слышат о роботах, представляют их антропоморфными — очень похожими на людей или отдаленно их напоминающими. Но у производителей на этот счет нет единого мнения. По словам Конюховской, человекоподобная платформа может быть избыточной и неоправданно дорогостоящей, хотя такие роботы предполагают более легкую адаптацию к человеческой среде обитания. Кроме того, существует эффект «зловещей долины», когда люди боятся слишком похожих на себя роботов, ассоциируя их с «живыми мертвецами».
«Некоторые компании стремятся идти дальше и бороться с этими страхами путем достижения еще большего сходства с человеком, а другие считают, что для того чтобы избежать этого барьера, наоборот, нужно создавать роботов, совсем не похожих на людей», — рассказала эксперт.
Поле для творчества
Все опрошенные порталом эксперты видят большие перспективы развития рынка социальной робототехники — как в России, так и в мире, — несмотря на то, что сейчас его объем не столь велик. Спрос на таких роботов растет в различных сферах и со стороны бизнеса, и со стороны частных потребителей.
Например, руководитель PR-отдела группы компаний «Нейроботикс» Раиса Богачева считает, что наибольшей популярностью у потребителей будут пользоваться роботы для бизнеса, нацеленные на создание или поддержание имиджа своего владельца, а также помощники в таких профессиях, как врач, в том числе логопед, психолог.
РобоКлон в центральной библиотеке города Зеленоград
Пресс-служба компании «Нейроботикс»
«Пока роботов купила только та часть потребителей, которые хотели попробовать что-то совсем новое, теперь подтягивается аудитория, которая увидела результаты и перспективы и тоже заинтересовалась», — считает она.
В свою очередь, директор по развитию компании «Промобот» Олег Кивокурцев выделил такие направления развития социальной робототехники, как решения для медицины, реабилитации и работы с социально незащищенными слоями населения.
«Для ухода за пенсионерами, людьми с ограниченными возможностями необходим специальный персонал. Часто эта работа требует особой квалификации, она сложная и низкооплачиваемая. Здесь на помощь должны прийти роботы», — пояснил он.
Основатель компании «ЗЕТ-Роботикс» Дамир Зайнуллин уверен, что рынок социальных роботов будет из года в год расти в направлениях, где они могут заменять людей на рабочих местах, по аналогии с тем, что ранее произошло на рынке индустриальных роботов.
«Работодателям станет выгоднее использовать роботов, в том числе программных роботов-ботов, вместо людей, работающих по таким профессиям, как водитель, повар, бухгалтер, кадровик, архитектор, психолог, менеджер среднего звена, охранник, строитель, работник телефонной техподдержки и регистратуры, ресепшен, — считает эксперт. — Дальше развитие этой индустрии будет идти в сторону рынка роботов для домашней прислуги».
При этом эксперты отметили, что в России направление сервисных, в том числе социальных, роботов развивается быстрее, чем промышленных.
Робот Promobot V.2 в Музее промышленности и искусства в Иваново
Владимир Смирнов/ТАСС
«Рынок промышленной робототехники довольно зрелый и развивается уже на протяжении 50 лет, в то время как рынок сервисной робототехники еще недосформирован и на нем возможна конкуренция за счет создания уникальных продуктов, а наши компании ничуть не уступают зарубежным», — отметила Алиса Конюховская.
«Сервисные роботы у нас развиваются лучше, чем промышленные, в силу того, что у нас остается достаточно дешевая рабочая сила, что тормозит развитие промышленной робототехники, а социальная робототехника упирается в спрос и ценовой фактор, который многим нашим гражданам по силам», — добавил Павел Кривозубов.
По его словам, об успехах отечественных производителей социальных роботов могут говорить удачные зарубежные контракты 2019 года, например таких резидентов «Сколково», как «Промобот» и «РОББО».
Расскажет и поможет
Робот Promobot, которого компания «Промобот» полностью производит в России, может общаться с людьми, умеет распознавать лица и речь и самостоятельно передвигаться, при этом не нуждаясь в контроле со стороны человека. Он способен выполнять функции живого сотрудника — гида, консьержа, консультанта, промоутера, хостес. Promobot работают уже в 37 странах мира, в том числе США и Кувейте.
Как рассказал порталу Олег Кивокурцев, сейчас компания действует по двум основным направлениям: развивает различные функции четвертой версии Promobot, чтобы он мог работать в разных сферах, и разрабатывает человекоподобного робота Robo-C.
Пресс-служба компании Promobot
Что касается Promobot V.4, то у компании уже есть решения для бизнес-центров и жилых комплексов, отделений многофункциональных центров, музеев и торговых центров. Например, робот-консьерж интегрируется с базой лиц, у которых есть доступ в здание, и оборудован диспенсером карт.
Кроме того, недавно компания закончила работу над роботом для диагностики и профилактики. Его оснастили тонометром, термометром, неинвазивным глюкометром, спирометром, спирографом и весами. Такой робот позволяет оперативно узнавать уровень артериального давления или уровень сахара в крови. Основываясь на полученных данных, робот дает рекомендации по образу жизни. При критичных показателях он рекомендует обратиться к врачу. По задумке разработчиков, робот может располагаться не только в медицинских учреждениях, но и в других местах повышенного скопления людей.
«Мы уже получаем положительную обратную связь и заинтересованность со стороны профессионального сообщества, — подчеркнул Кивокурцев. — Например, на последнем CES (Международная выставка потребительской электроники. — Прим. ред.) мы познакомились с представителями дома престарелых в США и теперь ведем переговоры по внедрению роботов для ухода и общения с людьми пожилого возраста».
Функционал Robo-C тот же, что и у робота Promobot четвертой версии, однако новая модель обладает искусственной кожей, мимикой, следит за собеседником глазами, демонстрирует эмоции.
«Внешность человека у робота позволяет нам преодолеть барьеры человеко-машинного взаимодействия. Сейчас у робота доступны только лицо и торс, однако мы уже ведем разработки над подвижными руками. Сначала они будут использоваться для жестикуляции, а потом и для выполнения точных манипуляций. Далее мы хотим прийти к полному функциональному телу», — сообщил Кивокурцев.
Интерактивный робот KIKI торговой марки AlfaRobotics
Антон Новодережкин/ТАСС
Производством роботов-промоутеров на российском рынке также занимается отечественная компания AlfaRobotics. Среди ее основных разработок робот-промоутер и робот-терминал, обслуживающий посетителей кафе. Этих электронных девушек зовут KIKI.
Кроме того, клиентов корпоративно-инвестиционного бизнеса Сбербанка обслуживает робот Анна. Как рассказали порталу в пресс-службе банка, она помогает в самообслуживании и идентификации клиентов. Она также способна определить причины звонка и в пилотном режиме переключить клиента на операторов, владеющих необходимыми для обслуживания навыками.
«Мы постоянно проводим дообучение робота и в дальнейшем, по достижении заданных критериев, планируем его внедрение в массовую эксплуатацию, но только для тех клиентов, которым удобно взаимодействовать с роботами», — добавили в пресс-службе.
Как услышать стихи Пушкина от первого лица
Российская компания «Нейроботикс» выпускает целую линейку антропоморфных роботов. Компания уже создала множество силиконовых устройств с портретным сходством разной внешности. Самые популярные из них — робот Алиса Зеленоградова и робот Пушкин.
Алиса может выполнять функции секретаря, персонального ассистента, помощника врача. Она способна управлять своей мимикой, вести диалог, определять эмоции по лицу говорящего. Робот — копия Александра Сергеевича Пушкина — может декламировать произведения, петь романсы, рассказывать детям и взрослым интересные факты из биографии поэта. Роботы этой серии используются на выставках, представлениях, а также в образовательной деятельности.
Робот Александр Пушкин компании «Нейроботикс» во время съёмок краеведческого сериала о городе Зеленоград
Пресс-служба компании «Нейроботикс»
Кроме того, в конце ноября 2019 года у компании появился новый, более совершенный робот серии «B» — Betsy, который получил дополнительные артикуляционные и интеллектуальные возможности. В планах производителя оснастить Betsy настоящими робототехническими руками.
Помимо силиконовых роботов, «Нейроботикс» также занимается производством проекционных устройств, более простых и обладающих более широким диапазоном мимических возможностей. Например, у компании есть проекционный робот-логопед, которого используют для проведения дыхательной и артикуляционной гимнастики, упражнений по выговариванию скороговорок. Он оценивает правильность произношения и говорит, если человек выполняет задание неточно. Также можно использовать таких роботов для изучения родного или иностранного языка.
В январе 2020 года Фонд развития высоких технологий XPRIZE объявил, что команда NeuroRobotics, которая состоит из сотрудников группы компаний «Нейроботикс» и лаборатории нейроробототехники Центра компетенций НТИ по направлению «Искусственный интеллект» МФТИ, прошла отбор для участия в технологическом конкурсе ANA Avatar по созданию робота-аватара. С его помощью пользователь будет иметь возможность видеть, слышать и взаимодействовать с миром удаленно. Итоги конкурса будут подведены в 2022 году.
«Мы называем своих роботов социальными, так как они создаются как помощники людей в сфере деятельности «человек — человек»: помощник врача, учителя, банкира, он может встречать, информировать и развлекать гостей, выступать в роли довольно сложного и интересного объекта для изучения робототехники», — рассказала Раиса Богачева.
По ее словам, задача компании — сделать человекоподобных роботов более доступным и массовым продуктом.
«В России, к сожалению, спрос на такие устройства пока не высок, но мы видим, что с каждым годом он увеличивается. Это касается как аренды, так и продажи», — сообщила она и отметила, что пока роботов больше покупают именно для развлекательных целей.
Богачева добавила, что сейчас основная проблема всех роботов — это недостаток интеллекта, необходимого для качественного и интересного ведения беседы, но в ближайшие годы тенденция может измениться.
Дамир Зайнуллин считает, что сейчас развитие российского и в целом мирового рынка социальных роботов сдерживается только психологической неготовностью людей. По его мнению, технологии уже давно вышли на уровень, необходимый для повсеместного внедрения социальных роботов. Но по мере смены поколений роботизация будет стремительно входить в нашу жизнь, так как молодежь психологически более готова к новому миру.
Автор: Ксения Петрова.
Подписывайтесь на наш телеграм-канал, чтобы первыми быть в курсе новостей венчурного рынка и технологий!
Промышленная робототехника | Analog Devices
ADIN1300 представляет собой малопотребляющий однопортовый приемопередатчик сети Ethernet, обладающий малой задержкой и предназначенный главным образом для применения в сетях промышленного Ethernet.
В это устройство встроено ядро физического уровня (PHY) энергоэффективного Ethernet (EEE) наряду со всеми необходимыми стандартными аналоговыми цепями, схемами буферизации входных и выходных сигналов синхронизации, интерфейсами управления и регистрами подсистемы, а также MAC-интерфейсом и управляющей логикой для управления сбросом и синхронизацией, а также настройки выводов.
ADIN1300 выпускается в 40-выводном корпусе LFCSP размером 6 мм x 6 мм. Для работы устройства требуется минимум два источника питания – 0,9 В и 3,3 В, при этом предполагается использование линии питания 3,3 В для интерфейса MAC. Для повышения универсальности работы устройства на системном уровне отдельная линия питания VDDIO позволяет изменять уровни напряжения питания интерфейсов MDIO и MAC независимо от других схем ADIN1300, обеспечивая при этом работу при 1,8 В, 2,5 В или 3,3 В. При включении питания ADIN1300 удерживается в режиме аппаратного сброса до тех пор, пока напряжение на каждой из линий питания не достигнет своего минимального порогового значения. Защита от пониженного напряжения питания обеспечивается с помощью мониторинга уровней питания, что позволяет определить, не падает ли напряжение одного или нескольких источников ниже минимально допустимого уровня (см. таблицу 17 в документации), и устройство будет удерживаться в режиме аппаратного сброса до тех пор, пока уровни напряжения источников питания не нормализуются до уровней, определенных схемой сброса по включению питания.
Интерфейс управления MII (также известный как интерфейс MDIO) обеспечивает двухстороннюю последовательную связь между хост-процессором или MAC (также известным как станция управления или STA) и ADIN1300, предоставляя доступ к информации управления и состояния, содержащейся в регистрах управления ядра физического уровня. Данный интерфейс совместим со структурами кадра пунктов 22 и 45 стандарта IEEE 802.3.
ADIN1300 поддерживает передачу данных на расстояние до 150 метров при гигабитной скорости и на расстояние до 180 метров при скорости 100 Мбит/с или 10 Мбит/с.
Области применения
- Промышленная автоматизация
- Системы управления процессами
- Автоматизация производства
- Робототехника / управление движением механизмов
- Автоматизация зданий
- Контрольно-измерительное оборудование
- Промышленный интернет вещей
Робототехника: чем полезна для детей
Наука о роботах (робототехника) приобретает все большую популярность в нашей жизни: специальные роботы изучают космическое пространство, на заводах применяются руки-манипуляторы, летающие дроны помогают операторам и корреспондентам, современные «умные» протезы улучшают жизнь людей с нарушенным здоровьем, а роботы-пылесосы и мойщики окон облегчают труд домохозяйкам.
В нашем веке возможность изучать и заниматься робототехникой появилась не только у научных сотрудников, но и у детей! Расскажем подробно о том, что такое робототехника, в чем ее польза для детей и с какого возраста можно приобщать ребенка к занятиям.
Что такое робототехника?
Робототехника – это наука, которая изучает проектирование и использование автоматизированных технологических систем, а попросту – роботов. Для детей существует возможность изучения робототехники в школах и в секциях дополнительного образования. Создаются роботы при помощи специальных конструкторов. Дети легко вовлекаются в этот процесс, ведь создать робота самостоятельно, а главное – получить результат, чрезвычайно интересно.
Большим плюсом также является тот нюанс, что занятия сочетают в себе как получение знаний, так и развлечения, а потому приобретают все большую востребованность у детей и их родителей.
Если ваш ребенок выказывает искренний интерес к технологиям, обратите внимание на робототехнику, в процессе изучения он освоит множество полезных навыков, станет более самостоятельным, активным и поверит в свои силы.
В чем польза робототехники для детей?
Польза этой науки бесспорна!
Конструируя роботов, ваш ребенок:
1. РАЗОВЬЕТ:
-
ответственность;
-
дисциплину;
-
творческое мышление;
-
воображение;
-
речь и умственные способности;
-
внимательность;
-
терпеливость;
-
целеустремленность;
-
усидчивость;
-
память;
-
мелкую моторику рук.
2. НАУЧИТСЯ:
-
работать в команде;
-
поэтапно действовать от простого к сложному;
-
хорошо ориентироваться в пространстве;
-
самостоятельно принимать решения;
-
уважать чужой труд;
-
доводить начатое дело до логического завершения.
3. ОСВОИТ:
-
азы компьютерной грамотности;
-
основы математики и физики;
-
работу с механизмами;
-
проектирование и конструирование;
-
многообразие окружающего мира;
-
навыки общения с педагогами и сверстниками;
-
английский язык (ведь большинство программ и обучающих текстов подаются именно на английском).
Дети, которые с раннего возраста посещали уроки робототехники, в будущем намного легче осваиваются в таких серьезных дисциплинах, как: программирование, физика, инженерное дело. Причиной этого является то, что самое простейшее конструирование в детские годы дает понимание того, как частное относится к целому, как из мелких частиц собрать рабочий продукт. В будущем такой интуитивный навык сослужит человеку хорошую службу.
Когда начинать обучение и где учить?
Детство – лучшая пора для занятий в кружках робототехники. Психологи называют самым подходящим возрастом – 4 года, ведь четырехлетки уже понимают абстракцию и способны составить алгоритмы и спроектировать схему, как бы нереально это не звучало. Приобщать малыша к робототехнике можно как в специальных кружках, так и дома, покупая конструкторы с механическими деталями. Если вы отдали свое чадо в секцию, необходимо параллельно начать изучать основы математики, иначе ребенку будут трудно.
В 10 лет дети уже могут изучать и программирование, в этом возрасте ребята начинают разбираться в структуре хранения данных и в более сложных алгоритмах. Для таких детей в дополнительном образовании уже доступно изучение теории машин и проектирование роботов.
Обучение должно быть эффективным и проходить под неусыпным надзором грамотного преподавателя с хорошей профессиональной подготовкой, который сможет учесть и возрастные, и умственные способности каждого ребенка. Нужно понимать, что робототехника дает детям возможность расширить пространство для развития своей творческой и познавательной активности, реализовать свои лучшие качества и способности, стать возможным стартом в будущей взрослой профессиональной деятельности. Все эти факты накладывают на профессию педагога по робототехнике определенную ответственность и владение обязательными знаниями.
Поэтому мы рекомендуем педагогам и родителям освоить нашу дистанционную программу в области преподавания робототехники. Курс дает реальную возможность выполнять обязанности педагога робототехники на высоком уровне и в финале обучения приобрести навыки планирования и реализации занятий в сфере дополнительного образования.
Какие конструкторы выбрать?
Конструкторы для занятий подбираются в соответствии с образовательной программой и возрастом ребенка. Они могут быть как отечественного, так и зарубежного производства. Для дошколят рекомендуется всеми любимый Lego – его легко собирать, он содержит детали ярких цветов, чем вызывает искренний восторг у самых маленьких конструкторов.
Для младших школьников и начинающих также подойдет набор Fischertechnik – его плюс в наличии настоящих проводов и штекеров, которые создают ощущение взрослого программирования.
В четырнадцать лет подростки отдают предпочтение более сложным моделям, требующим навыков программирования. Это ТРИК или Raspberry.
Отличие робототехники для детей от профессиональной взрослой
Детская робототехника ставит перед собой задачу научить детей самой дисциплине, а опытные специалисты решают конкретные «взрослые» задачи.
Малыши начинают занятия с самых простейших действий: разбираются с моторами, заставляют робота двигаться и поворачиваться. Состоявшиеся профессионалы же занимаются созданием серьезных технических систем.
Но все мы пониманием, что без детской робототехники не будет и взрослой, без интереса ребенка к созданию роботов не будет профессионального успеха у взрослого человека.
Роботы, которых создали школьники
В качестве примера о пользе занятий робототехникой расскажем об одаренных школьниках и изобретениях, которые им удалось создать.
-
Новороссиец Михаил Вульф, когда учился в 10 классе, изобрел робота для спасения утопающих. Его проект состоял из двух составляющих: катамаран с прикрепленной сеткой и манипулятор, способный вытащить из воды тонущего человека.
-
Федор Носков, старшеклассник из города Челябинска создал робота-поводыря, который с помощью ультразвукового сенсора распознавал и «обходил» препятствия и даже умел «слышать» голосовые команды. Интересно то, что в своей работе Федор использовал материалы только отечественного производства.
-
Работа шестнадцатилетнего школьника из столицы Беларуси Александра Дубовицкого – робот-уборщик. Рукой-манипулятором детище Александра умеет вытирать пыль, подметать полы, убирать разбросанные игрушки и даже способен принести хозяину тапочки не хуже верного пса.
Какие профессии связаны с робототехникой?
Занятия ваших детей в секциях робототехники не пройдут даром, а для некоторых могут выступить и твердой качественной базой в будущей профессии.
Сегодня в образовательных учреждениях страны существуют специальности, напрямую связанные с конструированием роботов. Кем же может стать ваш ребенок в будущем?
-
Робототехником (создание технических систем и роботов). Такой специалист вправе работать в любом учреждении, где необходимы навыки технического конструирования и моделирования, – в медицинской и промышленной сферах, в военно-космической индустрии.
-
Проектировщиком техники для детей (разработка и создание игрушек и игр для детей с участием запрограммированных роботов).
-
Проектировщиком нейроинтерфейсов (разработка специальных систем, позволяющих специалисту управлять роботом и осуществлять контроль над его действиями).
-
Проектировщиком роботов для дома (создание роботов для выполнения домашних функций – пылесос, садовник, сиделка, няня, уборщик).
По мнению экспертов и такие профессии как инженер-робототехник, программист, IT-разработчик не потеряют своей востребованности и актуальности в ближайшие годы. Поэтому нужно помнить, что помочь ребенку сделать первый шаг на пути к профессии будущего – это важная миссия взрослых любящих людей!
Простыми словами о видах роботов и классификациях в робототехнике — PROMOBOT
Робототехника — широкое понятие, в котором есть разные направления. В них можно запутаться. В этой статье разберём, какие из умных устройств можно назвать роботами, на какие виды они делятся и чем отличаются друг от друга.
Что вообще такое роботВ мире много разных умных устройств, но роботами являются далеко не все из них. Международный стандарт ISO 8373:2012 определяет робота как «приводной механизм, программируемый по двум и более осям, имеющий некоторую степень автономности, движущийся внутри своей рабочей среды и выполняющий предназначенные ему задачи».
То есть роботом можно назвать любое устройство или механизм, который выполняет предназначенные ему действия и одновременно отвечает трём условиям:
- SENSE: воспринимает окружающий мир с помощью сенсоров. Такими сенсорами могут быть микрофоны, камеры (всех областей электромагнитного спектра), различные электромеханические сенсоры, датчики и прочее.
- THINK: понимает окружающий мир и строит модель поведения, чтобы выполнять предназначенные ему задачи.
- ACT: воздействует на физический мир.
Если хотя бы одно из условий не выполняется, то такое устройство нельзя назвать роботом.
Беспилотный автомобиль — робот
Кофейный автомат — не роботSense: оснащён камерами и лидаром
Think: строит модели, понимает окружающий мир и принимает решения
Act: перевозит пассажиров или груз
Каких видов бывают роботыSense: панель с кнопками или сенсорный дисплей
Think: –
Act: выдаёт кофе
Существует принятое деление робототехники на типы в зависимости от общей прикладной области. Для этого используется классификация, предложенная в упомянутом выше стандарте ISO 8373:2012:
Промышленные роботы. Призваны выполнять задачи по автоматизации производства. Обычно это всевозможные манипуляторы.
Сервисные роботы. Призваны заменить или дополнить человека в решении типовых и рутинных задач в сфере обслуживания.
Грубо говоря, промышленные роботы находятся в производственном цеху, а сервисные роботы — за его пределами.
В соответствии с классификацией Международной федерацией робототехники (International Federation of Robotics — IFR) сервисная робототехника делится на два типа:
1. Персональные. Используются в нашей повседневной жизни:
- Роботы-пылесосы
- Кухонные роботы
- Роботы-сиделки
- Роботы-питомцы
- Секс-роботы
2. Профессиональные. Используются для извлечения выгоды при оказании различных услуг:
- Роботы-консультанты
- Роботы-гиды
- Роботы-администраторы
- Роботы-курьеры
- Роботы-диагносты
Если для разных персональных задач требуются разные модели роботов, то под несколько профессиональных задач можно запрограммировать одну и ту же модель.
Например, Promobot V.4 работает администратором отеля в Доброграде, полицейским в Дубае, экскурсоводом в Москве и ещё во многих местах под разными должностями.
На робота можно устанавливать разные дополнительные устройства: принтер, сканер для документов, банковский терминал и другие. Это помогает ему работать в разных сферах.
Резюмируем- Устройство может называться роботом, если оно умеет воспринимать и понимать окружающий мир, а также на него воздействовать.
- Роботы могут быть промышленными и сервисными.
- Промышленные роботы помогают автоматизировать производство, а сервисные помогают людям в трудных и рутинных задачах
- Сервисные роботы могут быть персональными и профессиональными.
- Персональные роботы используются в бытовых задачах, и под каждую нужна отдельная модель
- Профессиональные роботы используются для бизнес-задач, и одну модель можно запрограммировать под разную функциональность.
Что такое робототехника? Что такое роботы? Типы и использование роботов.
Ампутант играет музыку с помощью модульного протеза конечности из Лаборатории прикладной физики JHU
Как работают роботы?
Автономные роботы
Автономные роботы могут работать полностью автономно и независимо от управления оператором. Обычно они требуют более интенсивного программирования, но позволяют роботам занять место людей при выполнении опасных, повседневных или иным образом невыполнимых задач, от распространения бомб и глубоководных путешествий до автоматизации производства.Независимые роботы оказались наиболее разрушительными для общества, устраняя низкооплачиваемые рабочие места, но открывая новые возможности для роста.
Зависимые роботы
Зависимые роботы — это неавтономные роботы, которые взаимодействуют с людьми, чтобы улучшить и дополнить их уже существующие действия. Это относительно новая форма технологии, которая постоянно расширяется в новых приложениях, но одна из реализованных форм зависимых роботов — это современные протезы, которые контролируются человеческим разумом.
Знаменитый пример зависимого робота был создан компанией Johns Hopkins APL в 2018 году для пациента по имени Джонни Матени, человека, которому ампутировали руку выше локтя. Матени был снабжен модульным протезом конечности (MPL), чтобы исследователи могли изучать его использование в течение длительного периода времени. MPL контролируется с помощью электромиографии или сигналов, посылаемых от его ампутированной конечности, которая управляет протезом. Со временем Матени стал более эффективно контролировать MPL, а сигналы, посылаемые от его ампутированной конечности, стали меньше и менее изменчивыми, что привело к большей точности его движений и позволило Матени выполнять такие деликатные задачи, как игра на пианино.
Ведущие робототехнические компании нанимают сейчас
У этих робототехнических компаний сейчас много открытых вакансий.
Каковы основные компоненты робота?
- Система управления
- Датчики
- Приводы
- Электропитание
- Концевые эффекторы
Основные компоненты робота
Роботысозданы для того, чтобы предлагать решения для различных потребностей и выполнять несколько различных задач, поэтому для выполнения этих задач требуются различные специализированные компоненты.Однако есть несколько компонентов, которые являются центральными в конструкции каждого робота, например, источник питания или центральный процессор. В целом компоненты робототехники делятся на пять категорий:
Система управления
Вычисления включают в себя все компоненты, составляющие центральный процессор робота, часто называемый его системой управления. Системы управления запрограммированы так, чтобы указывать роботу, как использовать его определенные компоненты, в некоторой степени похожие на то, как человеческий мозг посылает сигналы по всему телу, для выполнения конкретной задачи.Эти роботизированные задачи могут включать в себя все, от минимально инвазивной хирургии до упаковки на конвейере.
Датчики
Датчикиобеспечивают робота стимулами в виде электрических сигналов, которые обрабатываются контроллером и позволяют роботу взаимодействовать с внешним миром. Обычные датчики, обнаруженные в роботах, включают видеокамеры, которые работают как глаза, фоторезисторы, которые реагируют на свет, и микрофоны, которые работают как уши. Эти датчики позволяют роботу фиксировать свое окружение и обрабатывать наиболее логичный вывод на основе текущего момента, а также позволяют контроллеру передавать команды дополнительным компонентам.
Приводы
Как указывалось ранее, устройство может считаться роботом только в том случае, если оно имеет подвижную раму или тело. Приводы — это компоненты, которые отвечают за это движение. Эти компоненты состоят из двигателей, которые получают сигналы от системы управления и движутся в тандеме для выполнения движения, необходимого для выполнения поставленной задачи. Приводы могут быть изготовлены из различных материалов, таких как металл или эластичный материал, и обычно работают с использованием сжатого воздуха (пневматические приводы) или масла (гидравлические приводы), но бывают разных форматов, чтобы наилучшим образом выполнять свои специализированные функции.
Источник питания
Подобно тому, как человеческому телу для функционирования нужна пища, роботам нужна энергия. Стационарные роботы, такие как те, что находятся на заводе, могут работать от сети переменного тока через настенную розетку, но чаще роботы работают от внутренней батареи. Большинство роботов используют свинцово-кислотные батареи из-за их безопасных качеств и длительного срока хранения, в то время как другие могут использовать более компактные, но также более дорогие серебристо-кадмиевые батареи. Безопасность, вес, возможность замены и жизненный цикл — все это важные факторы, которые следует учитывать при проектировании источника питания робота.
Некоторые потенциальные источники энергии для будущих разработок роботов также включают пневматическую энергию от сжатых газов, солнечную энергию, гидравлическую энергию, маховик хранения энергии органического мусора посредством анаэробного сбраживания и ядерную энергию.
Концевые эффекторы
Концевые эффекторы — это физические, обычно внешние компоненты, которые позволяют роботам завершить выполнение своих задач. Роботы на заводах часто имеют сменные инструменты, такие как распылители краски и сверла, хирургические роботы могут быть оснащены скальпелями, а другие виды роботов могут быть построены с захватывающими когтями или даже руками для таких задач, как доставка, упаковка, распространение бомб и многое другое.
36 ключевых робототехнических компаний, о которых вы должны знать 2021
Роботы захватывают мир. Ладно, не совсем. Еще нет. Но они становятся все более распространенными почти во всех отраслях, от здравоохранения и производства до обороны и образования.
Робототехнические компании, которые нужно знать
- Anduril
- Skydio
- Zipline
- Outrider
- Shapeways
- Nuro
- CANVAS Technology
- Piaggio Fast Forward
- Diligent Robotics
- Boston Dynamics
- Bluefin
- Робототехника для левой руки
- Робототехника для правой руки
- Dronesense
- Автоматизация сбора урожая
- Rethink Robotics
- Vicarious
В робототехнических компаниях по всей Америке слияние инженерии и науки приводит к созданию действительно инновационных продуктов — вещей, которые делают то, что обычно делают люди, только лучше.Будь то сварка, обучение, сборка автомобилей или выполнение хирургических операций, эти изобретения меняют наш образ жизни и работы.
Следующие 36 компаний вносят свой вклад в революцию робототехники.
АндурилОтрасль: Оборона
Место нахождения: Irvine, CA
Чем они занимаются: Anduril занимается созданием передовых аппаратных и программных продуктов, которые представляют собой решения самых серьезных проблем безопасности Америки и ее союзников.От Lattice, платформы на базе искусственного интеллекта, которая объединяет данные в реальном времени от Anduril и сторонних систем в единую панель управления, до сторожевых башен и интеллектуальных устройств поддержки с воздуха, Anduril представляет эффективную технологию, которая развертывается за часы, а не за годы.
SkydioОтрасль: Дроны
Расположение: Редвуд-Сити, Калифорния
Чем они занимаются: Skydio разрабатывает и производит интеллектуальные дроны, созданные с использованием технологии искусственного интеллекта и десятилетнего опыта исследований и разработок в области технологий дронов и компьютерного зрения.Флагманские продукты компании включают Skydio 2, беспилотный летательный аппарат, оптимизированный для видео и управляемый через приложение, контроллер или маяк, и Skydio X2, отличающийся прочным корпусом и ситуационной осведомленностью, проверкой активов и патрулированием безопасности для беспрецедентной навигации и логистики.
ZiplineОтрасль: Логистика
Расположение: Южный Сан-Франциско, Калифорния
Чем они занимаются: Zipline управляет глобальной автономной службой доставки, которая доставляет важные медицинские грузы людям, которые в них больше всего нуждаются.Компания предлагает как комплексную службу доставки, так и услуги по доставке и доставке вакцин, лекарств для неотложной помощи и расходных материалов по запросу. На сегодняшний день налетев почти 12 миллионов миль, Zipline ежедневно трансформирует операции по цепочке поставок.
OutriderОтрасль: Логистика
Расположение: Golden, CO
Чем они занимаются: Outrider производит автономные транспортные средства для работы на дворе, которые обеспечивают повышенную безопасность и сокращают выбросы в некоторых из наиболее важных мест.Помимо производства автономных транспортных средств, Outrider также создает инфраструктуру площадки и системы управления для оптимизации операций с транспортными средствами, способными соединяться с тягачом с прицепом и маневрировать между дверями дока, парковочными местами и местами для вывоза грузов по дороге.
ShapewaysОтрасль: 3D-печать
Расположение: Полностью удаленный
Чем они занимаются: Shapeways предлагает услуги 3D-печати по запросу, которые позволяют компаниям легко масштабировать свой бизнес и сокращать время сборки.На сегодняшний день компания напечатала более 21 миллиона деталей и способна использовать все аспекты 3D-печати, от быстрого прототипирования до аддитивного производства и индивидуального дизайна, что идеально подходит для таких отраслей, как робототехника, аэрокосмическая промышленность, здравоохранение, архитектура и многое другое.
Righthand RoboticsRighthand Robotics
Отрасль: Выполнение
Расположение: Бостон, Массачусетс
Чем они занимаются: Righthand Robotics разрабатывает адаптируемую роботизированную технологию, которая снижает проблемы, возникающие при выполнении заказов в традиционной электронной коммерции.Роботы компании позволяют выполнять такие задачи, как выбор и сортировка переносных предметов, чтобы быстро сократить время выполнения заказа, за что боты RightHand Robotics получили прозвище «сборщики».
Просмотреть вакансии + узнать больше
ВикариусВикариус
Отрасль: Робототехника
Место нахождения: Юнион-Сити, Калифорния
Чем они занимаются: Vicarious производит программное обеспечение для автоматизации, которое открывает больший диапазон движений и невероятные возможности роботизированных устройств.Программные решения компании позволяют машинам выполнять сложные задачи на сборочной линии, такие как паллетирование, сборка комплектов, уход за машинами, упаковка контейнеров, сортировка и расширенная упаковка, предлагая возможность сократить рабочее время в среднем до пятидесяти процентов.
Просмотреть вакансии + узнать больше
НуроНуро
Отрасль: Автономные транспортные средства
Адрес: Mountain View, CA
Чем они занимаются: Nuro выводит робототехнику на передний план повседневной жизни, разрабатывая технологии, которые помогают людям более эффективно использовать наши ресурсы, время и внимание.Флагманский продукт компании — это линейка полностью автономных дорожных транспортных средств, предназначенных для быстрой, безопасной и доступной перевозки грузов, поддерживаемых гибким внутренним дизайном, позволяющим выполнять различные поручения, начиная от получения продуктов из химчистки и заканчивая доставкой продуктов.
Просмотреть вакансии + узнать больше
Tempo AutomationTempo Automation
Отрасль: Создание прототипов
Место нахождения: Сан-Франциско, Калифорния
Чем они занимаются: Tempo Automation разрабатывает программное обеспечение, упрощающее процесс создания прототипов для производства электроники и робототехники.Компания специализируется на быстром прототипировании, предлагая передовым разработчикам создавать рабочие модели своих проектов всего за три дня. Программное обеспечение Tempo Automation обеспечивает полную прозрачность процесса создания прототипов, чтобы держать производителей в курсе производственного процесса и ожидаемых затрат, и используется организациями в аэрокосмической, медицинской и производственной отраслях.
Просмотреть вакансии + узнать больше
OusterOuster
Отрасль: Производство датчиков
Место нахождения: Сан-Франциско, Калифорния
Чем они занимаются: Компания Ouster стала пионером автономной революции, производя и производя сенсорную технологию трехмерного лидара, которая играет решающую роль в том, чтобы позволить машинам воспринимать окружающую среду.Компания работает с инженерами-лидерами в области робототехники, автономных транспортных средств, картографических технологий, систем безопасности и дополнительных областей технологического развития, с такими партнерами, как Honeywell, Kudan и Mechaspin.
Просмотреть вакансии + узнать больше
Технология CANVASТехнология CANVAS
Отрасль: Промышленность, логистика
Расположение: Боулдер, Колорадо
Назначение: CANVAS производит автономную роботизированную тележку для использования в производственных цехах и на производственных предприятиях.Оснащенный стереокамерами с полным трехмерным изображением от пола до потолка, датчиками, которые служат «виртуальными бамперами» и яркими светодиодными лампами, которые предупреждают людей о его присутствии, он собирает и отправляет в режиме реального времени данные о времени маршрута, узких местах и других факторах. которые влияют на безопасность и эффективность на рабочем месте.
Просмотреть вакансии + узнать больше
Piaggio Fast ForwardPiaggio Fast Forward
Отрасль: Логистика, компьютерное зрение
Расположение: Бостон, Массачусетс
Что он делает: Группа Piaggio, которая представила вам скутер Vespa, представляет собой Piaggio Fast Forward; робототехническая компания, занимающаяся созданием легких мобильных решений для людей и товаров.Флагманский робот компании, gita, является мобильным оператором, который следует за людьми и перевозит до 45 фунтов. Гиту можно использовать, чтобы носить с собой все, от тяжелых книг между уроками до продуктов.
Просмотреть вакансии + узнать больше
SpheroSphero
Отрасль: Образование, игры
Расположение: Боулдер, Колорадо
Что он делает: Sphero изобрел теперь всемирно известный роботизированный мяч с поддержкой приложений, который используется в классах по всему миру для обучения через игру.В дополнение к оригинальному мячу, другие продукты включают Sphero 2.0 и Sphero Mini, а также гоночных роботов с поддержкой приложений по имени Ollie и Darkside. Приложение Sphero Edu компании является центром программирования роботов и многого другого.
Просмотреть вакансии + узнать больше
Diligent RoboticsDiligent Robotics
Отрасль: Здравоохранение
Расположение: Остин, Техас
Назначение: Роботы Diligent с поддержкой искусственного интеллекта предназначены для работы с людьми в повседневной среде.Автономного робота Moxi компании можно оставить в покое для выполнения трудоемких логистических задач в больницах, таких как обустройство палат для пациентов и пополнение запасов. Способный перемещаться по коридорам больниц и другим труднодоступным местам, Moxi даже наделен «социальным интеллектом», который передается через движения головы и светодиодные глаза.
Просмотреть вакансии + узнать больше
PickNik RoboticsPickNik Robotics
Отрасль: Машинное обучение, промышленное производство
Расположение: Боулдер, Колорадо
Что он делает: Широкий спектр услуг PickNik включает в себя планирование движения, расширенную обратную кинематику, управление в реальном времени, предотвращение столкновений, интеграцию настраиваемых ros, 2D-навигацию, виртуальную реальность, моделирование роботов, машинное обучение для анализа рабочего пространства и многое другое.
Просмотреть вакансии + узнать больше
AnybotsAnybots
Отрасль: Здравоохранение, образование
Расположение: Сан-Хосе, Калифорния
Назначение: Роботы Anybots, оснащенные динамиком, камерой и видеоэкраном, служат в качестве удаленных аватаров, которые управляются через интерфейс на основе браузера и подключаются к Интернету через Wi-Fi. Допустим, вы находитесь в Чикаго и хотите быть на Тайване. Ваш робот, который имеет встроенную систему управления, возможности потоковой передачи видео в реальном времени и управляется клавишами со стрелками на клавиатуре вашего компьютера, может действовать как резервный.
Boston DynamicsBoston Dynamics
Отрасль: Военное дело, программное обеспечение
Расположение: Waltham, Massachusetts
Что он делает: Boston Dynamics производит множество различных роботов, которые обладают ловкостью, как у людей, так и у животных. Несколько примеров: есть SpotMini, «маневренный робот, который обрабатывает предметы, поднимается по лестнице и будет работать в офисах, домах и на открытом воздухе»; Атлас, «динамичный гуманоид», который «использует навыки равновесия и всего тела для достижения мобильных манипуляций двумя руками»; и WildCat, быстрое четвероногое животное, которое «использует галопирующую походку, как собака или лошадь, и наклоняется в поворотах, чтобы сохранить сцепление и равновесие.”
СаркосСаркос
Отрасль: Аэрокосмическая промышленность, энергетика, оборудование
Расположение: Сиэтл, Вашингтон
Что он делает: Компания Sarcos создает три разных типа роботов, которые выполняют совершенно разные функции. Робот Guardian ™ S используется для исследования резервуаров, транспортных средств и других объектов во время передачи данных. Робот Guardian ™ S может работать на больших расстояниях, преодолевать труднопроходимую местность, например, лестницы, а также змейки по трубам.Guardian ™ GT создан для таких разнородных задач, как подъем тяжелых грузов и сварка. Он также имеет приложения для служб быстрого реагирования, логистики и гуманитарной помощи. Guardian ™ XO® — это «промышленный экзоскелет с питанием без привязки, который увеличивает силу и выносливость человека, не ограничивая свободу движений оператора».
Технология BarrettТехнология Barrett
Отрасль: Промышленность, здравоохранение
Расположение: Newton, Massachusetts
Что он делает: Barrett производит шарнирные руки и кисти — то, что она называет «продвинутыми роботизированными манипуляторами» — для множества применений.Рука WAM® имитирует «человеческую грацию и ловкость». BarrettHand ™ серии BH8 может захватывать множество различных объектов. А Burt® разработан для тренировок по реабилитации верхних конечностей и исследований в области робототехники.
Bluefin RoboticsBluefin Robotics
Отрасль: Автомобильная промышленность, судостроение
Место нахождения: Куинси, Массачусетс
Назначение: Подразделение General Dynamics, Bluefin производит беспилотные и автономные подводные аппараты (UUV / AUV) для клиентов в оборонном, коммерческом и научном секторах.Предложение включает более 70 различных датчиков на более чем 100 автомобилях.
Прикладная аэронавтикаПрикладная аэронавтика
Отрасль: Сельское хозяйство, оборона, искусственный интеллект
Расположение: Остин, Техас
Чем занимается: Компания Applied Aeronautics производит беспилотные летательные аппараты (БПЛА). Его основной продукт — электрический самолет Albatross — используется в различных секторах, от сельского хозяйства и исследований до управления операциями в случае стихийных бедствий и защиты.
ПетрониксПетроникс
Отрасль: Домашние животные
Расположение: Чикаго, Иллинойс
Назначение: Petronics производит автоматическую игрушку для кошек под названием Mousr. Благодаря взаимозаменяемым хвостам, робот-мышь может выглядеть по-разному каждый раз, когда кошка гонится за ней. И им можно полностью управлять через приложение для смартфона на Android или iOS.
AMP RoboticsAMP Robotics
Отрасль: Cleantech
Расположение: Денвер, Колорадо
Что он делает: AMP (Autonomous Manipulation and Perception) создает роботизированную систему, которую он называет Cortex, которую можно использовать в различных средах (смешанные отходы, строительство / снос и т. Д.)) и запрограммирован с помощью искусственного интеллекта Neuron, чтобы быстро и эффективно снимать перерабатываемые материалы с конвейерной ленты. Идеальные конечные цели — «более высокая производительность, рост товарной выручки, лучшее качество тюков и фиксированная ставка рабочей силы с течением времени».
Левая робототехникаЛевая робототехника
Отрасль: Промышленность
Расположение: Лонгмонт, Колорадо
Назначение: Новые коммерческие роботы Left Hand предназначены для работы на открытом воздухе, в частности для уборки снега с помощью беспилотного SnowBot Pro компании.Дистанционно управляемый онлайн, он использует технологии GPS, акселерометра и гироскопа для навигации по заранее запрограммированному пути. SnowBot также оснащен датчиками для предотвращения препятствий и записывает в реальном времени данные о своем текущем состоянии и окружающей среде.
Модульная робототехникаМодульная робототехника
Отрасль: Образование
Расположение: Боулдер, Колорадо
Что он делает: Modular производит сборные блоки Cubelets и систему построения роботов MOSS, чтобы стимулировать «вычислительное мышление» и помочь детям лучше решать проблемы во взаимосвязанных средах посредством обучения на основе игр.По заявлению компании: «Студенты могут с легкостью проектировать и изменять конструкции роботов, используя блоки роботов для моделирования поведения в реальном мире».
DronesenseDroneSense
Отрасль: Общественная безопасность, программное обеспечение
Расположение: Остин, Техас
Что он делает: DroneSense производит дроны для приложений общественной безопасности, особенно с участием пожарных и полиции, которые могут быть развернуты в качестве служб быстрого реагирования для обследования мест пожаров или преступлений и предоставления важных данных до прибытия людей, чтобы «расширить ситуационную осведомленность».”
Воплощенноевоплощенное
Отрасль: Робототехника
Расположение: Пасадена, Калифорния
Что он делает: Embodied производит технологически продвинутых роботов-компаньонов, которые проявляют человеческую заботу и сострадание, повышая индивидуальное самочувствие и качество жизни.
Робототехника HoneybeeРобототехника Honeybee
Отрасль: Академия, Оборона, Аэрокосмическая промышленность
Адрес: Brooklyn, New York
Назначение: Технология HoneyBee Robotics использовалась в нескольких космических миссиях НАСА (включая посещение Марса) с 1983 года.Он также является крупным игроком в оборонной, горнодобывающей и нефтегазовой отраслях, производя интеллектуальные системы выемки грунта, автономные буровые установки и системы отбора проб, а также другие инновации. В области медицины продукция компании включает нейрохирургический робот и роботизированный эндоскопический лазерный скальпель.
Energid TechnologiesEnergid Technologies
Отрасль: Промышленность, сельское хозяйство, здравоохранение
Место нахождения: Кембридж, Массачусетс
Назначение: Программное обеспечение Energid Actin SDK обеспечивает расширенное управление движением в реальном времени для промышленных и бытовых робототехнических приложений в отраслях, где быстрый выход на рынок имеет первостепенное значение.
Автоматика для уборки урожаяАвтоматика для уборки урожая
Отрасль: Сельское хозяйство
Место нахождения: Биллерика, Массачусетс
Что он делает: Согласно Harvest, его модель HV-100 была «первым в мире полностью автономным роботом, который работает вместе с людьми в неизмененной промышленной среде». Сегодня более 30 из них обслуживают крупных сельскохозяйственных игроков в США, помогая повысить производительность, эффективность и качество растений.Когда дело доходит до ручного труда, роботы Harvest извлекают уроки из нагрузки, поэтому их коллеги-люди могут сосредоточиться на других аспектах процесса выращивания.
Интуитивный хирургическийИнтуитивный хирургический
Отрасль: Здравоохранение
Расположение: Саннивейл, Калифорния
Назначение: Роботы Intuitive используются для малоинвазивной хирургии. Оснащенная передовыми технологиями зрения, энергетическими системами, скобами и инструментами, постоянно обновляемая платформа da Vinci использовалась для миллионов операций с конца 1990-х годов.Более новый Ion ™ используется для малоинвазивной периферической биопсии легких.
iRobotiRobot
Отрасль: Робототехника
Место нахождения: Бедфорд, Массачусетс
Назначение: Компания iRobot, основанная в 1990 году, производит множество интеллектуальных устройств для уборки, мытья полов и мытья полов, включая Roomba, Braava, Mira и Create. Он также занимается обучением детей наукам и технологиям.
Просмотреть вакансии + узнать больше
МиомоМиомо
Отрасль: Здравоохранение
Место нахождения: Кембридж, Массачусетс
Что он делает: Подтяжка Myomo MyoPro с электроприводом предназначена для помощи тем, кто пережил паралич или ослабление кистей и предплечий из-за различных состояний.Устройство считывает нервные сигналы с поверхности кожи, а затем активирует небольшие двигатели, которые облегчают естественные движения рук и кистей.
Rethink RoboticsRethink Robotics
Отрасль: Автомобильная промышленность, промышленность
Расположение: Бостон, Массачусетс
Назначение: Коллаборативные роботы Rethink («коботы») выполняют множество функций для нескольких отраслей. Они включают в себя: «самовывоз», процесс перемещения деталей в разные места и обратно; совместная упаковка и конечная упаковка; Обслуживание станков с ЧПУ; литье пластмасс под давлением и выдувное формование и многое другое.Конечная цель компании — помочь компаниям «повысить производительность, решить проблему нехватки рабочей силы и повысить качество».
Робототехника Vecna Робототехника Vecna
Отрасль: Логистика
Место нахождения: Кембридж, Массачусетс
Назначение: Автономные роботы Vecna, используемые в производстве, складировании и реализации, транспортируют, поднимают и транспортируют все типы материалов в среде, ориентированной на человека. Они перемещают материалы между производственными ячейками в цехе или на складе.Они помогают операторам складов и дистрибьюторов быстро перемещать товары с минимальными затратами. Компания также заявляет, что ее платформы «резко увеличивают скорость подбора тележек за счет оптимизации подборов и автоматизации горизонтальной транспортировки, что значительно сокращает расстояния ходьбы».
Просмотреть вакансии + узнать больше
Willow GarageWillow Garage
Отрасль: Робототехника
Место нахождения: Пало-Альто, Калифорния
Что он делает: Создатель программного и аппаратного обеспечения для робототехники, Willow ставит перед собой задачу «способствовать продвижению передовых достижений в технологиях автономной робототехники.«Его роботы включают PR2 для исследований и инноваций, сервис-ориентированный TurtleBot (он может даже приносить вам еду!) И« систему удаленного присутствия »Texai, с помощью которой вы можете виртуально присутствовать в Италии, сидя в Нью-Йорке.
Шесть автомобильных робототехнических компаний, о которых нужно помнить
В 2005 году 90% всех роботов были обнаружены в одном месте: на автомобильных заводах. Сегодня, 14 лет спустя, это число упало до менее чем 50%, и вот почему: почти во всех отраслях открывает инновационные способы привлечь этих нечеловеческих помощников.Несмотря на это, король автомобильной промышленности по-прежнему управляет роботами.
«Без этой автоматизации наши заводы давно бы устарели», — сказал об автомобильных роботах доктор Джей Барон, бывший генеральный директор Центра автомобильных исследований. «Автоматизация необходима для безопасности, качества и производительности».
Но эти роботы в ближайшее время не вытеснят людей. Вместо этого они представляют собой совместные творения, призванные максимизировать эффективность всего процесса автомобилестроения.Они делали это годами. Еще в 2014 году люди, как сообщалось, были на 85% продуктивнее, работая с роботами, чем без них.
Automotive Robotics
Роботы были жизненно важны для автомобильной промышленности на протяжении десятилетий, и они будут приобретать все большее значение по мере того, как автомобили и производственный процесс становятся умнее. Роботы работают вместе с людьми для выполнения различных задач, от сварки и вставки деталей на сборочную линию до использования лазеров для распознавания неисправных частей автомобиля.
Ford, GM, Mercedes-Benz, BMW и практически все другие производители используют «совместных роботов» на своих заводах для выполнения таких функций, как покраска автомобилей, сварка и работы на конвейере. Эксперт по робототехнике Фрэнк Тобе считает, что такие роботы станут только более полезными в будущем и что «традиционные роботы в клетках на автомобильных заводах устаревают».
Эти шесть американских компаний помогают формировать будущее автомобильной робототехники.
Rethink Robotics Rethink RoboticsРасположение: Бостон
Как робототехника используется в автомобильной промышленности: Rethink Robotics Co-боты помогают при работе с материалами, обслуживании машин, тестировании, проверке и даже упаковке готовой продукции.Второй робот компании, Сойер (на фото выше), работает с крошечными деталями и может проникать в ограниченное пространство.
Влияние на отрасль: Производитель автомобильных запчастей Tennplasco использовал Sawyer от Rethink Robotics для создания и проверки деталей сборочной линии. Сообщается, что он выполнял работу двух человек.
Rockwell Automation Rockwell AutomationРасположение: Милуоки
Как робототехника используется в автомобильной промышленности: Используется для сборки автомобилей, Роботы Rockwell Automation обеспечивают помощь в кузовных цехах — от установки деталей и покраски автомобилей до помощи в управлении запасами и контроле качества.
Влияние на отрасль: Заглядывая в будущее, Rockwell разрабатывает роботов, которые помогут автоматизировать производство электромобилей. Компания предлагает различные технологии и роботов для масштабирования завода по производству электромобилей.
Кука КукаМесто нахождения: Аугсбург, Германия
Как робототехника используется в автомобильной промышленности: Обширная линейка роботов и программного обеспечения Kuka позволяет автоматизировать процессы производства автомобилей.Например, программное обеспечение компании устанавливается в готовые приложения для роботов и может запускать все, от трехмерной визуализации до моделирования. Роботы Kuka могут выдерживать большие нагрузки и выполнять такие задачи, как сварка, гидроабразивная резка и проверка линии сборки.
Влияние на промышленность: Kuka производит не менее 18 роботов для автоматизации автомобильной промышленности, которые делают все, от лазерной сварки и мойки до создания элементов сидений для автомобилей BMW с использованием трехмерной геометрии.
Acieta AcietaРасположение: Каунсил-Блафс, Айова
Как робототехника используется в автомобильной промышленности: Acieta создает роботов FANUC для автоматизации сборочных линий, которые обладают широким диапазоном движений и способны выполнять множество задач.Их можно использовать для всего, от создания автомобильных компонентов (например, насосов или двигателей) до сварки больших кузовных панелей и небольших кронштейнов.
Влияние на промышленность: Компания Acieta установила более 4400 своих промышленных роботов для автомобилестроения на заводах в Северной Америке.
Robotic VIsion Technologies Robotic Vision TechnologiesРасположение: Silver Springs, Md.
Как робототехника используется в автомобильной промышленности: Robotic Vision Technologies создает программное обеспечение с 3D-визуализацией для роботов и второстепенных роботов.Single Camera 3D, совместимая со всеми крупными промышленными ботами, помогает находить и идентифицировать различные части автомобиля менее чем за 0,1 секунды. Роботизированное зрение помогает производителям автомобилей повысить эффективность за счет способности распознавать различные автомобильные детали и отправлять предупреждения о неисправностях.
Влияние на промышленность: Технологиям роботизированного зрения доверяют некоторые из самых известных мировых производителей, включая Boeing, Ford и Toyota.
Универсальные роботы Универсальные роботыРасположение: Бостон
Как робототехника используется в автомобильной промышленности: Universal Robots создала трех разных роботов, которые интегрируются в автомобильную производственную линию.Роботизированная рука, имитирующая движение человеческой руки, обеспечивает дополнительную точность в различных процессах изготовления автомобилей. UX компании может заменить людей-операторов на опасных, грязных или монотонных работах, освобождая рабочих для выполнения более сложных и эффективных задач.
Влияние на отрасль: Ведущий испанский автомобильный журнал Autorevista наградил компанию Universal Robots своей ежегодной наградой за лидерство в отрасли в 2018 году за «радикальное преобразование промышленной робототехники.«
Изображения из социальных сетей, встроенные архивы и Shutterstock
Что такое роботы и как они работают?
Робот — это тип автоматизированной машины, которая может выполнять определенные задачи с минимальным вмешательством человека или без него, а также со скоростью и точностью. Область робототехники, которая занимается проектированием, проектированием и эксплуатацией роботов, за последние 50 лет значительно продвинулась вперед.
IDC определяет робототехнику как один из шести ускорителей инноваций, способствующих цифровой трансформации.К другим относятся 3D-печать, когнитивные вычисления, безопасность нового поколения и виртуальная реальность или дополненная реальность.
Что умеют роботы?По сути, существует столько разных типов роботов, сколько задач, которые они должны выполнять. Роботы могут выполнять одни задачи лучше, чем люди, но другие лучше оставить людям, а не машинам.
Роботы умеют лучше людей:
- Автоматизируйте ручные или повторяющиеся действия в корпоративных или промышленных условиях.
- Работайте в непредсказуемых или опасных условиях, чтобы выявлять опасности, например утечки газа.
- Обработка и предоставление отчетов для обеспечения безопасности предприятия.
- Заполните рецепты на лекарства и приготовьте внутривенные инъекции.
- Доставляйте онлайн-заказы, обслуживание номеров и даже пакеты с едой во время чрезвычайных ситуаций.
- Ассистент во время операций.
- Роботы также могут создавать музыку, следить за береговой линией на предмет опасных хищников, помогать в поиске и спасении и даже помогать в приготовлении пищи.
Несмотря на растущее повсеместное распространение, использование роботов имеет несколько недостатков.
Могут, например:
- оперируют, но не успокаивают напуганных пациентов;
- распознает незаметные шаги в закрытом пространстве, но не принимает мер против взломщиков ворот;
- проводят занятия для пожилых людей, но не облегчают их одиночество;
- помогать медицинским работникам с диагнозами, но не сочувствовать пациентам; и
- учится на данных, но неправильно реагирует на непредвиденные ситуации.
Усложняющиеся возможности роботов в конечном итоге устранят некоторые человеческие задачи, но не все. Современные технологии робототехники могут автоматизировать только 25% задач в непредсказуемых, зависящих от человека областях, таких как строительство и уход. Но роботы зависят от человеческого программирования — и они (вероятно) всегда будут.
Виды роботовЕсть столько разных типов роботов, сколько и задач.
1. Андроиды
Андроиды — это роботы, похожие на людей.Часто они подвижны, передвигаются на колесах или гусеничном ходу. По данным Американского общества инженеров-механиков, эти гуманоидные роботы используются в таких областях, как уход и личная помощь, поиск и спасение, освоение космоса и исследования, развлечения и образование, связи с общественностью и здравоохранение, а также производство. По мере роста числа вариантов использования и приложений рынок Android к 2026 году достигнет 13 миллиардов долларов.
2. Телечир
Телечир — это сложный робот, которым дистанционно управляет человек-оператор для системы телеприсутствия.Это дает человеку ощущение того, что он находится в отдаленной, опасной или чужой среде, и позволяет им взаимодействовать с ним, поскольку телечир постоянно обеспечивает сенсорную обратную связь.
3. Робот дистанционного присутствия
Робот телеприсутствия имитирует опыт — и некоторые возможности — физического присутствия в определенном месте. Он сочетает в себе удаленный мониторинг и управление с помощью телеметрии, передаваемой по радио, проводам или оптоволокну, и обеспечивает удаленные бизнес-консультации, здравоохранение, домашний мониторинг, уход за детьми и многое другое.
Роботизированная хирургическая система da Vinci позволяет хирургам управлять миниатюрными хирургическими инструментами, установленными на роботизированных манипуляторах, с помощью другой руки, имеющей увеличенную 3D-камеру. Камера обеспечивает врачам обзор участка, когда они манипулируют инструментами с помощью пальцевого главного управления.4. Промышленный робот
IFR (Международная федерация робототехники) определяет промышленный робот как «автоматически управляемый, перепрограммируемый многоцелевой манипулятор, программируемый по трем или более осям.«Пользователи также могут адаптировать этих роботов к различным приложениям. Объединение этих роботов с ИИ помогло предприятиям вывести их за рамки простой автоматизации и перейти к более высокоуровневым и более сложным задачам.
По данным IFR, в 2019 году по всему миру было установлено более 3
промышленных роботов, при этом лидирующие позиции занимают Китай, Япония и США.
В промышленных условиях такие роботы могут:
- оптимизировать производительность процесса;
- автоматизировать производство для повышения производительности и эффективности;
- ускорить разработку продукта;
- повысить безопасность; и
- снижение затрат.
5. Роевой робот
Роботы Swarm (также известные как роботы-насекомые) работают в составе флотов от нескольких до тысяч, и все они находятся под контролем одного контроллера. Эти роботы аналогичны колониям насекомых, поскольку индивидуально демонстрируют простое поведение, но демонстрируют более сложное поведение со способностью выполнять сложные задачи в целом.
6. Умный робот
Это самый продвинутый вид роботов.Умный робот имеет встроенную систему искусственного интеллекта, которая учится на своей среде и опыте, чтобы накапливать знания и расширять возможности для постоянного улучшения. Умный робот может сотрудничать с людьми и решать проблемы в следующих областях:
- нехватка сельскохозяйственных рабочих мест;
- пищевых отходов;
- исследование морских экосистем;
- организация продукции на складах; и
- Расчистка от завалов зон бедствия.
Не все роботы похожи на HAL 9000 в 2001: A Space Odyssey или BigDog — внедорожный четвероногий робот со сложными датчиками, гироскопами и гидравлическими приводами — от Boston Dynamics.Некоторые из них имеют человеческие черты (андроиды), а другие — все механические конечности (PackBot). Третьи выглядят как брелки (тамагочи) или летающие игрушки (Roomba).
Тем не менее, все роботы имеют некоторые общие характеристики, например:
- механическая конструкция
- электрические компоненты
- компьютерное программирование
По мере развития ИИ и программного обеспечения роботы станут умнее, эффективнее и будут решать более сложные задачи.
Роботизированная автоматизация процессов и интеллектуальная автоматизация процессов
Технология роботизированной автоматизации процессов (RPA) включает в себя проектирование, развертывание и использование программных роботов для выполнения следующих задач:
- автоматизировать бизнес-процессы на основе правил;
- оптимизировать работу предприятия;
- экономия человеческих усилий; и
- снижение затрат.
RPA автоматизирует повторяющиеся задачи, чтобы человеческий персонал мог сосредоточиться на более ценной работе. Сценарии использования могут быть простыми (автоматические ответы по электронной почте) или сложными (автоматизация тысяч заданий).
RPA — это ступенька к более продвинутой интеллектуальной автоматизации процессов (IPA). IPA добавляет возможности принятия решений, инструменты искусственного интеллекта и когнитивные технологии, такие как обработка естественного языка и машинное обучение.
RPA ведет к более совершенным интеллектуальным системам автоматизации процессов. Роботы и робототехника: краткая историяПьеса 1921 года, р.U.R. , что означает универсальные роботы Россум, чешский писатель Карел Чапек впервые ввел слово «робот». Эти роботы были искусственными людьми, а не машинами, и могли думать самостоятельно, поэтому они чем-то похожи на современных андроидов. Айзек Азимов сказал, что Чапек ввел слово «робот» во все языки, на которых написана научная фантастика. Азимов представил слово «робототехника» и свои знаменитые «Три закона робототехники» в своем рассказе «Обход».
Первые роботы, хотя в то время их так не называли, на самом деле появились за несколько веков до ревущих двадцатых.В 1478 году Леонардо да Винчи сконструировал самоходный автомобиль, который до сих пор считается важным для робототехники. Хотя эта автономная система не прошла мимо чертежной доски, в 2004 году группа итальянских ученых воспроизвела ее конструкцию в виде цифровой модели, доказав, что она работает.
Новаторские работы Азимова и да Винчи заложили основу для последующих разработок. В 1950 году английский ученый-компьютерщик Алан Тьюринг разработал тест Тьюринга, который первоначально назывался «Имитационная игра», и заложил основу для дальнейших исследований в области искусственного интеллекта и робототехники.
Тест Тьюринга, разработанный Аланом Тьюрингом, представляет собой метод исследования, позволяющий определить, может ли устройство ИИ (компьютер, робот и т. Д.) Думать как человек.Стэнли Кубрик « 2001: Космическая одиссея » представил одного из первых в мире роботов с искусственным интеллектом, HAL 9000 . HAL может распознавать речь, понимать естественный язык и даже выигрывать шахматные партии. Теперь, когда HAL входит в Зал славы Университета Карнеги-Меллона, он по-прежнему вдохновляет ученых на поиск способов дублирования своих возможностей, которые предполагались в 1960-х годах.
В 1950-х годах Джордж К. Девол изобрел перепрограммируемый манипулятор — Unimate. Инженер Джозеф Энглебергер приобрел патент на робота Девола и преобразовал его конструкцию в первого в мире промышленного робота . В конце концов он получил звание «Отец робототехники».
В 1966 году Массачусетский технологический институт разработал одного из первых ботов на основе искусственного интеллекта, ELIZA, в то время как SRI International позже разработала Shakey, самоуправляемого робота для специализированных промышленных приложений. К началу 70-х ученые успешно интегрировали ботов в медицину с MYCIN, чтобы помочь идентифицировать бактерии, и компьютерный диагностический инструмент INTERNIST-1.В 80-х годах прошлого века была разработана робототехника ALVINN, которая используется в современных беспилотных автомобилях.
К 1990-м годам боты, ориентированные на потребителя, появились в виде компьютерных игр, таких как Tamagotchi. После 2000 года интерес к роботам и робототехнике резко вырос с выпуском SmarterChild, запрограммированного бота в AOL Instant Messenger, который теперь считается предшественником искусственного интеллекта Siri от Apple.
В начале 2000-х годов были изобретены PackBot, военный робот, и Stanley, автомобильный бот , .Примечательно, что PackBot сыграл важную роль в ликвидации последствий терактов 11 сентября, так как службы быстрого реагирования отправили робота в завалы для поиска жертв и оценки структурной целостности обломков. PackBot отправил обратно фотографии из труднодоступных мест, помогая в спасательных операциях.
Stan — робот, который автономно перемещает транспортные средства в целях логистики.PackBot вдохновил новую эру робототехники, ускорив разработку более совершенных автономных машин, которые теперь помогают в следующих областях:
- Управление операциями в случае стихийных бедствий
- правоохранительные органы
- прогнозы погоды
- бытовая гигиена
- военная разведка
Позже бытовые роботы, такие как Roomba, и роботы на основе искусственного интеллекта, такие как Siri и Alexa, проложили путь для роботов в повседневной жизни людей, развивая их потенциал.
Современные роботы могут выполнять ряд сложных задач, которые даже полвека назад сочли бы научной фантастикой. Умные, интеллектуальные роботы теперь сотрудничают с людьми и помогают решать проблемы, которые в прошлом казались неразрешимыми.
См. Также: нанотехнологии, сверхъестественная долина, робот телеприсутствия и робототехника
Что такое робототехника?
Что такое робототехника?Робототехника — это отрасль инженерии, которая включает в себя концепцию, проектирование, производство и эксплуатацию роботов.Целью области робототехники является создание интеллектуальных машин, которые могут помогать людям разными способами.
Робототехника может принимать разные формы. Робот может напоминать человека или иметь форму роботизированного приложения, такого как роботизированная автоматизация процессов (RPA), которая имитирует взаимодействие людей с программным обеспечением для выполнения повторяющихся задач, основанных на правилах.
Хотя область робототехники и исследования потенциальных возможностей использования и функциональности роботов значительно расширились в 20-м веке, эта идея, безусловно, не нова.
Умный робот Rethink Robotics Baxter Ранняя история робототехникиТермин робототехника является расширением слова робот . Одно из первых его применений пришло от чешского писателя Карела Чапека, который использовал это слово в своей пьесе «Универсальные роботы Россума » в 1920 году.
Тем не менее, именно писатель-фантаст Исаак Азимов был признан первым, кто использовал этот термин в 1940-х годах в Оксфордском словаре английского языка .
В рассказе Азимова он предложил три принципа, управляющих поведением автономных роботов и умных машин.
Три закона робототехники Азимова сохранились до наших дней:
- Роботы никогда не должны причинять вред людям.
- Роботы должны следовать инструкциям людей, не нарушая правила 1.
- Роботы должны защищать себя, не нарушая других правил.
Однако только пару десятилетий спустя, в 1961 году — на основе разработок 50-х годов — был создан первый программируемый робот Unimate, который перемещал ошпаривающиеся металлические детали из машины для литья под давлением.
Есть много разных роботов. Приложения для робототехникиСегодня промышленные роботы, как и многие другие типы роботов, используются для выполнения повторяющихся задач. Они могут принимать форму роботизированной руки, роботизированного экзоскелета или традиционных гуманоидных роботов.
Промышленные роботы и манипуляторы используются производителями и на складах, например, принадлежащими Amazon, Devol, Best Buy и другим.
Для работы сочетание компьютерного программирования и алгоритмов, дистанционно управляемого манипулятора, исполнительных механизмов, систем управления — действия, обработки и восприятия — датчиков реального времени и элемента автоматизации помогает информировать о том, что делает робот или роботизированная система.
Некоторые дополнительные приложения для робототехники:
Машинное обучение в робототехнике
Машинное обучение и робототехника пересекаются в области, известной как обучение роботов . Обучение роботов — это изучение методов, которые позволяют роботу приобретать новые знания или навыки с помощью алгоритмов машинного обучения.
Некоторые приложения, которые были исследованы с помощью обучения роботов, включают захват объектов, категоризацию объектов и даже лингвистическое взаимодействие с человеком-сверстником.Обучение может происходить через самоисследование или под руководством человека-оператора.
Чтобы учиться, умные роботы должны накапливать факты с помощью человеческого ввода или датчиков. Затем блок обработки робота сравнивает вновь полученные данные с ранее сохраненной информацией и прогнозирует наилучший курс действий на основе полученных данных.
Однако важно понимать, что робот может решать только те проблемы, для решения которых он создан. Не обладает общими аналитическими способностями.
Роботизированная автоматизация процессов автоматизирует повторяющиеся и основанные на правилах задачи, основанные на цифровой информации. Плюсы и минусы робототехникиРоботизированные системы востребованы во многих отраслях, потому что они могут повысить точность, снизить затраты и повысить безопасность людей.
Фактически, безопасность, возможно, является одним из величайших преимуществ робототехники, поскольку многие опасные или нездоровые среды больше не требуют человеческого фактора. Примеры включают ядерную промышленность, космос, оборону, техническое обслуживание и многое другое.
Некоторые преимущества и недостатки робототехникиС помощью роботов или роботизированных систем рабочие могут избежать воздействия опасных химических веществ и даже снизить психосоциальные и эргономические риски для здоровья. Однако, несмотря на эти преимущества, робототехника также имеет несколько недостатков.
Есть определенные задачи, которые просто лучше подходят для людей — например, те работы, которые требуют творческого подхода, адаптируемости и навыков принятия критических решений.
См. Также: бот, программный робот, сверхъестественная долина, робот телеприсутствия, мобильный робот, социальный робот, вероятностная робототехника, развивающая робототехника, умный робот и экономика роботов.
Как работают роботы | HowStuffWorks
На самом базовом уровне человек состоит из пяти основных компонентов:
- Структура тела
- Мышечная система для перемещения структуры тела
- Сенсорная система, которая получает информацию о теле и окружающей среде.
- Источник энергии для активации мышц и датчиков
- Мозговая система, которая обрабатывает сенсорную информацию и сообщает мышцам, что делать
Конечно, у нас также есть некоторые нематериальные атрибуты, такие как интеллект и мораль, но на самом деле физический уровень, приведенный выше список охватывает его.
Робот состоит из тех же компонентов. Типичный робот имеет подвижную физическую структуру, какой-то двигатель, сенсорную систему, источник питания и компьютерный «мозг», который управляет всеми этими элементами. По сути, роботы — это созданные человеком версии животной жизни — это машины, которые копируют поведение человека и животных.
В этой статье мы исследуем базовую концепцию робототехники и узнаем, как роботы делают то, что они делают.
Джозеф Энгельбергер, пионер промышленной робототехники, однажды заметил: «Я не могу дать определение роботу, но я узнаю его, когда вижу его.«Если вы рассмотрите все разные машины, которые люди называют роботами, вы увидите, что практически невозможно дать исчерпывающее определение. У всех свое представление о том, что представляет собой робот.
Вы, наверное, слышали о некоторых из этих знаменитых robots:
- R2D2 и C-3PO: умные говорящие роботы с множеством индивидуальностей из фильмов «Звездные войны»
- Sony AIBO: роботизированная собака, которая обучается посредством человеческого взаимодействия
- Honda ASIMO: робот, который может ходить на двух ногах, как человек
- Промышленные роботы: Автоматизированные машины, работающие на сборочных линиях
- Данные: Почти человеческий андроид из «Звездного пути»
- BattleBots: Истребители с дистанционным управлением в Comedy Central
- Роботы для обезвреживания бомб
- Марсоходы НАСА
- HAL: корабельный компьютер в фильме Стэнли Кубрика «2001: Космическая одиссея»
- Robomower: робот для стрижки газонов от Friendly Robotics
- The Робот из телесериала «Затерянные в космосе»
- MindStorms: популярный робототехнический комплект LEGO
Все эти вещи, по крайней мере, некоторые люди считают роботами.В самом широком смысле робот определяется как все, что многие люди считают роботом. Большинство робототехников (людей, создающих роботов) используют более точное определение. Они указывают, что у роботов есть перепрограммируемый мозг (компьютер), который перемещает тело.
Согласно этому определению, роботы отличаются от других подвижных машин, таких как автомобили, из-за их компьютерного элемента. Во многих новых автомобилях есть бортовой компьютер, но он нужен только для небольших настроек. Вы управляете большинством элементов автомобиля напрямую с помощью различных механических устройств.Роботы отличаются от обычных компьютеров по своей физической природе — к нормальным компьютерам не прикреплено физическое тело.
В следующем разделе мы рассмотрим основные элементы, присутствующие в большинстве современных роботов.
Все рассматриваемые технологии: NPR
Робототехника: все рассматриваемые технологии: NPRРобототехника: все технологии рассматриваются Робототехника
Робототехника
Роботы-доставщики Starship Technologies, которых можно встретить на тротуарах Вашингтона, округ Колумбия.C. Чем больше они водят, тем умнее они становятся — узнавая о тротуарах и схемах дорожного движения с каждой поездкой. Мэг Келли / NPR скрыть подпись
переключить подпись Мэг Келли / NPRГолодный? Позвоните своему соседскому роботу-доставщику
Nissan теперь предлагает миру автономные кресла. Nissan скрыть подпись
переключить подпись Nissan Библиотека научных фотографий RM / Getty ImagesКогда человек помещает палец в прорезь слева, робот использует алгоритм — непредсказуемый даже для его создателя — чтобы решить, уколоть ли палец булавкой на конце руки. Александр Ребен скрыть подпись
переключить подпись Александр РебенРобот, который вредит: когда машины принимают решения о жизни или смерти
W.Х. Ричардс и А.Х. Реффелл построили Эрика в 1928 году. По оценкам Музея науки, опытному робототехнику Джайлзу Уокеру потребуется три месяца, чтобы восстановить его. Гамма-трапеция через Getty Images скрыть подпись
переключить подпись Гамма-трапеция через Getty ImagesЛондонский музей надеется перезагрузить Эрика, первого британского робота
Роботизированный череп киборга Т-600, использованный в фильме Терминатор 3 . Эдуардо Парра / Getty Images скрыть подпись
переключить подпись Эдуардо Парра / Getty ImagesВзвешивание достоинств и недостатков автономных роботов-убийц в бою
Фернандо Бойто бросает Эмили, спасательное устройство с дистанционным управлением, в воду у берегов греческого острова Лесбос.Бойто, помощник начальника пожарной охраны из Лос-Анджелеса, помогает обучать греческих служб быстрого реагирования использовать Эмили. Джоанна Какиссис для NPR скрыть подпись
переключить подпись Джоанна Какиссис для NPRКак высокотехнологичный буй по имени Эмили может спасти мигрантов из Греции
УммаГоуд (Томми Тибаджия), пилот Лиги гонок на дронах, управляет своим квадрокоптером на заброшенной электростанции в Нью-Йорке. Лига гонок на дронах скрыть подпись
переключить подпись Лига гонок на дронахВидеоигра IRL: Лига гонок на дронах стремится стать NASCAR в воздухе
Беспилотный прототип автомобиля Google можно найти на улицах возле штаб-квартиры интернет-компании в Кремниевой долине, чтобы проверить реакцию программирования на различные ситуации. Тони Авелар / AP скрыть подпись
переключить подпись Тони Авелар / APЖенщина держит планшет, демонстрируя аналитику данных, проводимую с помощью технологии IBM Watson. IBM скрыть подпись
переключить подпись IBMРяд беспилотных автомобилей Lexus от Google на мероприятии Google в Маунтин-Вью, Калифорния. Автомобили используют датчики и вычислительную мощность для маневрирования в условиях дорожного движения. Эрик Рисберг / AP скрыть подпись
переключить подпись Эрик Рисберг / APНасколько мы в действительности близки к сообществу, управляемому роботами?
Робот из компании Team IHMC Robotics из Флориды упал, пытаясь пройти по щебням.Эта команда заняла второе место и выиграла приз в 1 миллион долларов. DARPA Robotics Challenge скрыть подпись
переключить подпись DARPA Robotics ChallengeНа испытании DARPA роботы (медленно) движутся к более эффективному восстановлению после сбоев
Немецкий сервисный робот Toomas был разработан, чтобы приветствовать покупателей и помогать им находить товары в магазине. Йорг Сарбах / AP скрыть подпись
переключить подпись Йорг Сарбах / APВниманию белых воротничков: роботы приходят на вашу работу
Покупатели рассматривают и фотографируют робота-гуманоида «Чихиру» на стойке приема информации универмага Mitsukoshi в Токио. Крис МакГрат / Getty Images скрыть подпись
переключить подпись Крис МакГрат / Getty ImagesОна почти настоящая: новый гуманоид по обслуживанию клиентов в Токио
DAR-1 — один из многих социальных роботов со способностями распознавания лиц, представленных в контактном зоопарке роботов на интерактивном фестивале South by Southwest. Джек Планкетт / AP скрыть подпись
переключить подпись Джек Планкетт / APSXSW представляет контактный зоопарк роботов для личного взгляда в будущее
Роботы Kiva маневрируют вокруг одного из новейших распределительных центров Amazon в воскресенье в Трейси, Калифорния. Брэндон Бейли / AP скрыть подпись
переключить подпись Брэндон Бейли / APAmazon запускает армию роботов, чтобы быстрее отправлять праздничные пакеты
Младший, разрабатываемый потребительский робот, скоро может стать дополнительным набором глаз и ушей в вашем доме. Роамботика скрыть подпись
переключить подпись РоамботикаTALON MAARS (Modular Advanced Armed Robotic System) может быть преобразован из вооруженного робота в робота с рукой и захватом, заменив его модули. PRNewsFoto / Foster-Miller Inc. скрыть подпись
переключить подпись PRNewsFoto / Foster-Miller Inc.Когда роботы могут убивать, неясно, кто будет виноват
Робот BigDog в Boston Dynamics в 2010 году.BigDog разрабатывается, чтобы помочь солдатам переносить тяжелую технику в полевых условиях. Он может следовать за человеком, идущим по мокрой / песчаной / каменистой местности, как собака. Сюзанна Крайтер / Boston Globe через Getty Images скрыть подпись
переключить подпись Сюзанна Крейтер / Boston Globe через Getty ImagesС роботами-покупками Google, советом в будущее
Приложение MindMeld от Expect Labs использует предиктивные вычисления, чтобы передавать нам информацию, а не спрашивать. Предоставлено Expect Labs скрыть подпись
переключить подпись Предоставлено Expect LabsКомпьютеры, которые знают, что вам нужно, прежде чем вы спросите
Трехмерные принтеры могут выглядеть сложными, но их довольно легко собрать. Оливер Куинлан / Flickr скрыть подпись
переключить подпись Оливер Куинлан / FlickrКристофер Во пилотирует свой самолет, пока местные энтузиасты дронов собираются для полета в Мэриленд в аэропорту Лейтонсвилля, штат Мэриленд. Билл О’Лири / The Washington Post / Getty Images скрыть подпись
переключить подпись Билл О’Лири / The Washington Post / Getty ImagesУстройство RoboRoach позволяет пользователям влиять на передвижения тараканов с помощью смартфона. Backyard Brains (Мозги на заднем дворе) скрыть подпись
переключить подпись Backyard Brains (Мозги на заднем дворе)Что такое жуткий, ползучий и чемпион нейробиологии?
Загрузить больше историй
.