Квадрокоптеры — как все начиналось?
Современный квадро (гекса, окто) коптер — это достаточно мощное «вычислительное» устройство, способное управляться со смартфона по WiFi, зависать в одной точке, летать по маршруту и пр. Купить такой аппарат сейчас может любой желающий. А с чего все начиналось?
Как летает квадрокоптер?
Чтобы понимать суть технических решений, разберемся немного как вообще квадрокоптер летает. По сути, квадрокоптер — это неустойчивая система. Если взять 4 мотора, и просто подключить их к батарейке, квадрокоптер никуда не полетит, он просто перевернется т.к. сила тяги моторов никогда не будет идентичной. И тут вступает в действие электроника. На борту квадрокоптера есть центральная «плата управления», ключевой частью которой является блок датчиков. В простейшем случае, это трехосевой гироскоп. Микроконтроллер постоянно считывает данные с гироскопов, и как только гироскоп «чувствует» наклон по какой-либо оси, контроллер дает соответствующему двигателю команду чуть-чуть увеличить или уменьшить обороты, чтобы компенсировать наклон. В общем-то и вся логика — за исключением кучи всего (ПИД-регуляторов, теории управления, фильтров Калмана), ничего сложного тут нет (шутка). Ну а для пользователя все действительно прозрачно. Никаких движущихся частей кроме моторов, в квадрокоптере нет, все управление происходит исключительно изменением вращения оборотов моторов (с поворотами аналогично — изменяем скорости вращения, получаем вращающий момент). А теперь вернемся к истории.
Осторожно, траффик.
MikroKopter
Легендарная немецкая компания, благодаря инженерам которой в 2006 году появился первый аппарат. Контроллер имел на борту процессор Atmega644 c 4Кбайт памяти и частотой до 20МГц, 3 гироскопа по каждой из осей, акселерометр (для возможности горизонтального полета) и барометр для удержания высоты (точность барометра MPX4115A около 1м). Позже появились дополнительные модули, например GPS для удержания позиции.
Сейчас в youtube можно найти видео, как примерно все это летало (2007 год).
В целом система оказалась весьма удачной. Их продукция никогда не была дешевой, ценник начинался где-то от 1500Евро. Фирма существует и сейчас, они производят профессиональные аппараты, ценовая категория соответствующая. И еще один важный момент — первоначально, создатели Микрокоптер сделали исходный код открытым. Разумеется, уже в скором времени стали появляться различные клоны (в том числе производимые и в РФ), это конечно негативно сказалось на продажах, и код потом закрыли. Но все-таки, думаю это послужило большим толчком к созданию различного вида мультикоптеров.
KaptainKuk
Одна из самых простых систем, выпускаемых (в различных версиях) с 2010 года и до сих пор. Плата управления имеет только 3 гироскопа, для регулировки параметров используются обычные переменные резисторы.
(Фото с сайта Hobbyking.com)
Такая плата сейчас стоит всего около 15$, как можно видеть, на борту кроме гироскопов и слабого процессора, в общем-то ничего и нет. Прошивки в исходных кодах для KK свободно доступны в Интернете, желающие могут скачать их, набрав в поиске гугла имя файла «kk2_1V1.zip» (размер всего 90Кб). Наверное, это первая и последняя версия прошивки какого-либо коптера, написанная на ассемблере.
MultiWii
Следующей вехой в развитии коптеров стала система MultiWii. Название пошло от игрового манипулятора Nintendo Wii и Wii Nunchuk, которые умельцы разбирали, и выпиливали оттуда плату с датчиками. В качестве центрального процессора использовалась Arduino Nano.
Впрочем, за несколько лет система эволюционировала, и последние платы (они продаются и сейчас, цена вопроса 20-30$) выглядят где-то так:
(фото с сайта Hobbyking.com)
Последние версии MultiWii имеют вполне неплохие датчики, умеют зависать в точке по GPS, удерживать высоту и возвращаться домой. Т.к. Multiwii был написан для Arduino, все платы так и остались Arduino-совместимыми, исходный код можно скачать на Github. Одним из недостатков MultiWii является слабый процессор, что ограничивает вычислительные возможности алгоритмов, позже стали появляться клоны на STM32, однако погоды они не сделали, т.к. в плане «железа» любой квадрокоптер достаточно прост, 95% сложности заключается именно в коде. В то же время, я уверен что именно исходники MultiWii стали основой всех сегодняшних коммерческих систем.
ArduCopter
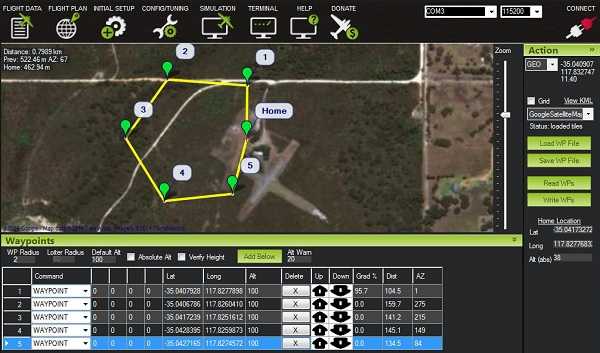
Еще одна система, основанная на Arduino, пошла дальше всех. Сейчас это система с возможностью программируемого полета по точкам, поддержкой радиомодемов и передачи телеметрии, хранения различных логов и пр.
Их софт выглядит примерно так: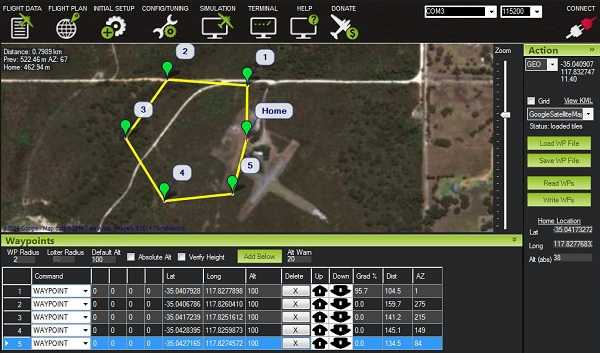
Платы эволюционировали от таких:
до таких

Платы продаются и сейчас, цена вопроса от 50$ (за клоны) до 250$ за оригинальные версии. Исходные коды Ardupilot так же полностью доступны на github, и судя по количеству коммитов, проект активно развивается. Эта система по возможностям не уступает профессиональным аппаратам, качество полета можно посмотреть на видео:
Здесь все классно, за исключением одного «но» — это Open Source, со всеми вытекающими последствиями. Система открытая, дорабатывается энтузиастами, и никто ничего не гарантирует, в том числе и отсутствия багов в софте. Если квадрокоптер упадет на чей-то BMW, жаловаться будет некому.
Бесколлекторные подвесы (brushless gimbal)
Параллельно с квадрокоптерами, развивалась еще одна очень интересная технология — бесколлекторный подвес для фото/видео камеры. Это отдельная плата со своими датчиками, которая удерживает камеру в нужном положении за счет двух моторов, компенсируя развороты по соответствующим осям. Их разрабатывал наш соотечественник, как работает подвес, можно видеть на видео (2013й год).
Видно что коптер качается, а ось камеры нет.
Сейчас этим уже никого не удивить, а тогда это был настоящий прорыв в качестве видеосъемки.
Коммерческие системы
Про них писать не так интересно, т.к. принцип здесь простой, «заплати и лети». Первым был вышеупомянутый MicroKopter, следующей (и не очень удачной) попыткой был XAircraft, в бюджетном секторе были популярны аппараты марки Gaui (это был первый бюджетный аппарат ценой около 400$ за готовый коптер). И наконец, самой успешной компанией является DJI, про которую не писал только ленивый, так что повторяться здесь смысла нет. Они вышли на рынок с контроллерами DJI Naza (ценой 200-400$, с возможностью удержания позиции, возврата домой), была отдельная профессиональная серия DJI Wookong (ценой около 1000$ и большей стабильностью полета). Наконец, DJI вышла на рынок устройств готовых к полету (RTF, Ready To Fly), ну про них уже все знают.
И последние видео.
Первый бюджетный квадрокоптер Gaui 330. Цена вопроса 400$, 2010 год, никаких доп.функций.
Dji Naza v2, цена вопроса те же 400$, возможность удержания позиции, возврата домой, полета любой стороной к пилоту (режим carefree).
Dji Phantom 3 — со встроенным подвесом камеры, управлением со смартфона и прочими плюшками.
На этом пока все, sorry за большое количество видео, но без них никак, иначе было бы неинтересно. Посмотрим что будет дальше, лет через 5…
Автор: DmitrySpb79
Источник
www.pvsm.ru
Квадрокоптеры — как все начиналось? / Хабр
Современный квадро (гекса, окто) коптер — это достаточно мощное «вычислительное» устройство, способное управляться со смартфона по WiFi, зависать в одной точке, летать по маршруту и пр. Купить такой аппарат сейчас может любой желающий. А с чего все начиналось?Как летает квадрокоптер?
MikroKopter
Легендарная немецкая компания, благодаря инженерам которой в 2006 году появился первый аппарат. Контроллер имел на борту процессор Atmega644 c 4Кбайт памяти и частотой до 20МГц, 3 гироскопа по каждой из осей, акселерометр (для возможности горизонтального полета) и барометр для удержания высоты (точность барометра MPX4115A около 1м). Позже появились дополнительные модули, например GPS для удержания позиции.
Сейчас в youtube можно найти видео, как примерно все это летало (2007 год).
В целом система оказалась весьма удачной. Их продукция никогда не была дешевой, ценник начинался где-то от 1500Евро. Фирма существует и сейчас, они производят профессиональные аппараты, ценовая категория соответствующая. И еще один важный момент — первоначально, создатели Микрокоптер сделали исходный код открытым. Разумеется, уже в скором времени стали появляться различные клоны (в том числе производимые и в РФ), это конечно негативно сказалось на продажах, и код потом закрыли. Но все-таки, думаю это послужило большим толчком к созданию различного вида мультикоптеров.
У нас MikroKopter не был популярен из-за цены, и владельцев было не так уж много. Однако толчок мировому сообществу был дан, и различные системы стали появляться.
KaptainKuk
Одна из самых простых систем, выпускаемых (в различных версиях) с 2010 года и до сих пор. Плата управления имеет только 3 гироскопа, для регулировки параметров используются обычные переменные резисторы.

(Фото с сайта Hobbyking.com)
Такая плата сейчас стоит всего около 15$, как можно видеть, на борту кроме гироскопов и слабого процессора, в общем-то ничего и нет. Прошивки в исходных кодах для KK свободно доступны в Интернете, желающие могут скачать их, набрав в поиске гугла имя файла «kk2_1V1.zip» (размер всего 90Кб). Наверное, это первая и последняя версия прошивки какого-либо коптера, написанная на ассемблере.
MultiWii
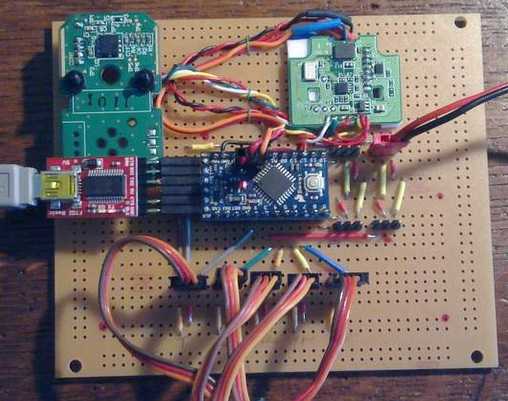
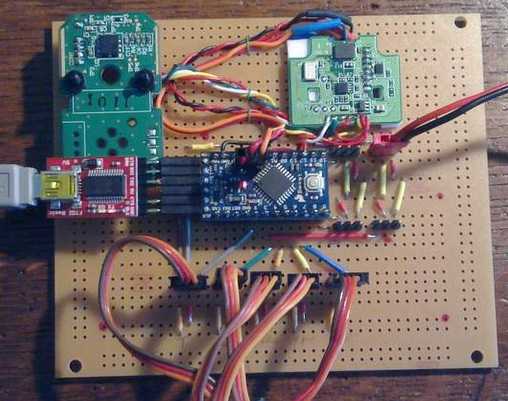
Следующей вехой в развитии коптеров стала система MultiWii. Название пошло от игрового манипулятора Nintendo Wii и Wii Nunchuk, которые умельцы разбирали, и выпиливали оттуда плату с датчиками. В качестве центрального процессора использовалась Arduino Nano.
Внешний вид платы получался примерно такой (фото с сайта rcgroups, 2010 год):
Впрочем, за несколько лет система эволюционировала, и последние платы (они продаются и сейчас, цена вопроса 20-30$) выглядят где-то так:
(фото с сайта Hobbyking.com)
Последние версии MultiWii имеют вполне неплохие датчики, умеют зависать в точке по GPS, удерживать высоту и возвращаться домой. Т.к. Multiwii был написан для Arduino, все платы так и остались Arduino-совместимыми, исходный код можно скачать на Github. Одним из недостатков MultiWii является слабый процессор, что ограничивает вычислительные возможности алгоритмов, позже стали появляться клоны на STM32, однако погоды они не сделали, т.к. в плане «железа» любой квадрокоптер достаточно прост, 95% сложности заключается именно в коде. В то же время, я уверен что именно исходники MultiWii стали основой всех сегодняшних коммерческих систем.
ArduCopter
Еще одна система, основанная на Arduino, пошла дальше всех. Сейчас это система с возможностью программируемого полета по точкам, поддержкой радиомодемов и передачи телеметрии, хранения различных логов и пр.
Их софт выглядит примерно так:
Платы эволюционировали от таких:
до таких
Платы продаются и сейчас, цена вопроса от 50$ (за клоны) до 250$ за оригинальные версии. Исходные коды Ardupilot так же полностью доступны на github, и судя по количеству коммитов, проект активно развивается. Эта система по возможностям не уступает профессиональным аппаратам, качество полета можно посмотреть на видео:
Здесь все классно, за исключением одного «но» — это Open Source, со всеми вытекающими последствиями. Система открытая, дорабатывается энтузиастами, и никто ничего не гарантирует, в том числе и отсутствия багов в софте. Если квадрокоптер упадет на чей-то BMW, жаловаться будет некому.
Бесколлекторные подвесы (brushless gimbal)
Параллельно с квадрокоптерами, развивалась еще одна очень интересная технология — бесколлекторный подвес для фото/видео камеры. Это отдельная плата со своими датчиками, которая удерживает камеру в нужном положении за счет двух моторов, компенсируя развороты по соответствующим осям. Их разрабатывал наш соотечественник, как работает подвес, можно видеть на видео (2013й год).
Видно что коптер качается, а ось камеры нет.
Сейчас этим уже никого не удивить, а тогда это был настоящий прорыв в качестве видеосъемки.
Коммерческие системы
Про них писать не так интересно, т.к. принцип здесь простой, «заплати и лети». Первым был вышеупомянутый MicroKopter, следующей (и не очень удачной) попыткой был XAircraft, в бюджетном секторе были популярны аппараты марки Gaui (это был первый бюджетный аппарат ценой около 400$ за готовый коптер). И наконец, самой успешной компанией является DJI, про которую не писал только ленивый, так что повторяться здесь смысла нет. Они вышли на рынок с контроллерами DJI Naza (ценой 200-400$, с возможностью удержания позиции, возврата домой), была отдельная профессиональная серия DJI Wookong (ценой около 1000$ и большей стабильностью полета). Наконец, DJI вышла на рынок устройств готовых к полету (RTF, Ready To Fly), ну про них уже все знают.
И последние видео.
Первый бюджетный квадрокоптер Gaui 330. Цена вопроса 400$, 2010 год, никаких доп.функций.
Dji Naza v2, цена вопроса те же 400$, возможность удержания позиции, возврата домой, полета любой стороной к пилоту (режим carefree).
Dji Phantom 3 — со встроенным подвесом камеры, управлением со смартфона и прочими плюшками.
На этом пока все, sorry за большое количество видео, но без них никак, иначе было бы неинтересно. Посмотрим что будет дальше, лет через 5…
habr.com
Что такое квадрокоптер, зачем он нужен, кто его придумал и как он устроен?
Приветствуем всех, кто не безразличен к БПЛА и по этой причине оказались на страницах нашего сайта! Что такое квадрокоптер? Как и кем был разработан? Почему он стал таким популярным сегодня? Как летает, как устроен, и для каких целей предназначен? Зачем и для чего он нужен?
Пожалуй, это основные вопросы, которые интересуют новичков в беспилотном пилотировании. Приобретение первого дрона – дело ответственное, ведь от того, каким он окажется, во многом зависит ваш дальнейший интерес и увлечение коптерами в принципе.
Именно поэтому важно иной раз обратиться к истокам, чтобы иметь общее представление о таких современных гаджетах, знать, чего от них ожидать, понимать принцип работы квадрокоптера и т.п. Все эти и другие аспекты мы постараемся осветить сегодня более подробно.
Что такое и зачем он нужен?
Квадрокоптер – англоязычный термин, дословно переводимый на русский, как «четырехвинтовой вертолет». Но что это означает на практике? По сути, это беспилотник (летательный аппарат на ДПУ), оснащенный четырьмя винтовыми пропеллерами. Управление осуществляется посредством специального RC-пульта с земли.

На большинстве современных моделей дронов установлены миниатюрные видеокамеры, обеспечивающие возможности съемки в фото- и видеоформате с воздуха.
Как только первые квадрики появились на прилавках магазинов беспилотной техники на радиоуправлении, их цена едва ли могла привлечь обывателя. Но со временем стоимость таких гаджетов продолжала стремительно падать (собственно, она продолжает падать со времен своего появления до сих пор, а ценовой диапазон – расширяться до бесконечных пределов). Сегодня они доступны многим людям со средним достатком.
Появились и квады с камерой, которые стали настоящим бумом среди широких масс любителей БПЛА. Таким образом, сфера их применения существенно развернулась по всем фронтам, привлекая внимания людей всех возрастов, от школьников и дошколят, до людей пенсионного возраста, любителей и профи в сфере беспилотных полетов, любителей спортивных состязаний на мультикоптерах, журналистов, блогеров, репортеров и даже представителей военно-разведывательных структур.
Современные технологии дроностроения шагнули далеко вперед в последние годы. Но в большинстве случаев на вопрос о том, что такое коптер и каково его предназначение, люди склонны отвечать – это гаджет для развлечения и захватывающих любительских съемок с высоты.
Кто придумал?
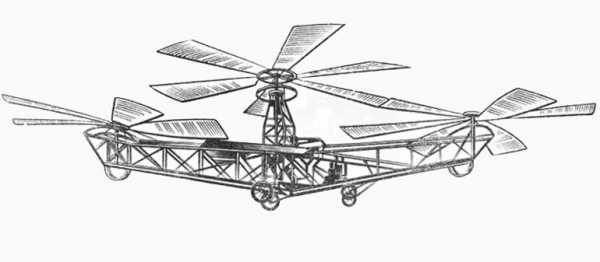
История создания/разработки таких БПЛА уходит корнями в первую половину прошлого века. Первый действующий прототип всех действующих ныне любительских и профессиональных дронов, а также вертолетов появился в 1922 году и получил название «вертолет Ботезата». В рамках первых тестовых полетов ему удалось не только успешно подняться в воздух, но и поднять с собой на высоту до четырех метров груз весом около 450 килограмм.

Георгий Александрович Ботезат – тот, кто придумал квадрон, был гражданином США российского происхождения, изобретателем, естествоиспытателем и профессором Петроградского института высоких технологий.
Разработки первого в мире квадрона под его началом велись при финансовой поддержке армии США. Военным требовался летательный аппарат, который сможет производить вертикальные взлеты и посадки. Со временем проект был прикрыт из-за определенных технических трудностей.
Основная проблема состояла в обязательном наличии попутного ветра для полетов. Ученый так и не успел довести разработку и оптимизацию схемы вращения двигателей до конца.
Почему именно 4 мотора?
Испытания вертолета с 4-мя винтами начались под руководством Ботезета в 22-м году. Устройство квадрокоптера на основе четырехвинтовой конструкции еще в те времена было признано наиболее устойчивым и оптимальным с точки зрения полетных характеристик.
Благодаря многовинтовому принципу работы, аппарат становился легко управляемым. Для поворота достаточно было изменить положение носовой части коптера.
В более поздние времена, когда начальные квады на радиоуправлении обзавелись полноприводной винтовой системой, они получили абсолютный баланс и максимальный полетный контроль, а все недостатки квадрокоптеров были минимизированы за счет внедрения новых технологий и электроники. По сей день 4-моторный коптер — лучший и самый надежный с точки зрения конструкции, летных и технических характеристик.
Мультикоптеры

Мультикоптер – это альтернативный, вариант квадронов, превосходящий их по количеству моторов. Его несущие винты вращаются диагонально и в противоположных по отношению друг к другу направлениях.
Различаются мультикоптеры между собой количеством моторов. В современной практике помимо трех- и четырехвинтовых моделей встречаются гексакоптеры и октокопторы с 6- и 8-ю пропеллерами, соответственно. Количество винтовых элементов по большому счету определяет возможности пиковых нагрузок аппарата по массе, то есть то, сколько веса он сможет взять с собой на борт.
Устройство и принцип работы

Принцип действия современных коптеров предельно прост. Каждый несущий винт приводится в движение электромотором. Одна часть двигателей вращается по часовой стрелке, а вторая – против. Это позволило исключить из конструкции квада хвостовой винт и сложный в плане конструктивной реализации автомат перекоса.
Рама
Как правило, каркасная рама любого квадрика имеет X-образную форму. На конце каждого из четырех лучей закреплена винтомоторная конструкция, обеспечивающая аппарату необходимую летную тягу.

Часто для придания оригинальности кваду раму украшают имитацией кабины пилота, различными принтами и светодиодными огнями. К слову LED-подсветка выполняет не только декоративную функцию – зачастую она помогает пилоту ориентироваться в управлении и позиционировании квадрика, а также необходима для пилотирования в темное время суток.
Платы управления и полетный контроллер
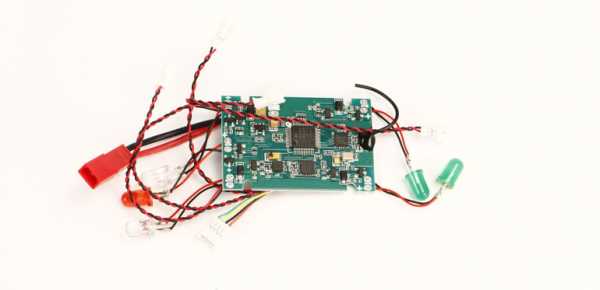
Контроллерная плата – мозг любого дрона. Она отвечает за все бортовые программные функции, включая контроль оборотов двигателей, съемку интегрированной камерой, позиционирование в пространстве на основе GPS-координат, работу светодиодов, выполнение виражей, прием различных сигналов с ДПУ и многое другое.
Мотор
Большая часть любительских мультикоптеров оснащена двумя типами электродвигателей – коллекторными и бесколлекторными. Как правило, вторые используются в бюджетных, любительских и наиболее простых вариантах. Их мощности вполне достаточно для поднятия в воздух мало и средне весовых квадронов любительского класса.

Коллекторные двигатели имеют другую, более совершенную конструкцию и несколько иной принцип работы. Они лишены коллекторов и щеток. Магнитные элементы расположены вокруг вала и выполняют непосредственно роторную функцию. Таким образом, двигатель работает с более плавным контролем оборотов у винтов и с большей отдачей, что обеспечивает лучшую тягу, энергорасход и производительность.
Трансмиттер и Пульт управления

Трансмиттер, то есть передатчик сигнала или пульт управления – это основной контрольный элемент любого квадрика. Контроль осуществляется посредством радиоволн, излучаемых аппаратурой на определенной частоте (как правило, это 2,4ГГц для радиосигнала и 5,8 для AV-видеосигнала с большим радиусом покрытия).
Регуляторы оборотов
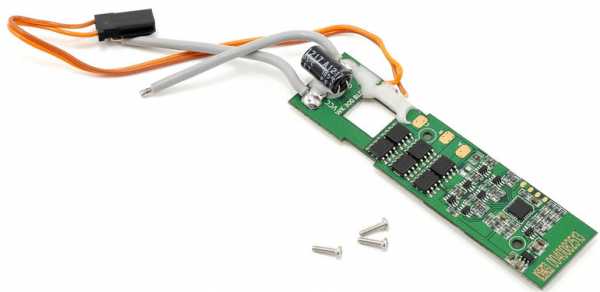
Регуляторы оборотов или контроллеры скорости полета отвечают за контроль мощности двигателей. Суммарный рабочий ток этих элементов должен превышать по своим показателям максимальный ток электромоторов. Среди основных параметров, о которых нужно знать, подбирая оборотные регуляторы самостоятельно, стоит отметить максимальный рабочий ток и диапазон рабочих напряжений.
FPV

В данном контексте аббревиатура FPV подразумевает трансляцию видео с бортовой камеры агрегата на принимающее устройство в режиме реального времени от первого лица. В качестве приемника могут использоваться очки VR, а также пилотный шлем или монитор трансмиттера/смартфона. Иными словами, технология позволяет видеть пилоту то, что «видит» дрон в момент планирования.
Подвес с камерой

Это важная часть любых мультикоптеров с функцией съемки. Подвесное крепление служит для соединения видеокамеры с корпусом аппаратика. Она может иметь несколько осей (обычно две или три), позволяющих вращать камеру для захвата изображения в различных направлениях.
Нередко подвес оснащается специальными демпферными подушками, которые призваны гасить вибрации и обеспечить качественную стабилизацию видео на аппаратном уровне.
Батарея

АКБ – это сердце квадронов, обеспечивающее зарядом винтовые моторы. Они могут иметь моноблочную или многоблочную структуру, от чего во многом зависит их емкость. Аккумуляторные блоки подсоединяются в электроники посредством специальных клемм и устанавливаются на борт в специальных блоках. Для многих моделей предусмотрена возможность замены АКБ на аналогичные или с большей мощностью.
Чтобы понять, можно ли использовать другую батарею, необходимо внимательно почитать описание или инструкцию к агрегату.
Почему так популярен?
Ошеломительную популярность эти устройства получили в последние несколько лет, во многом благодаря параллельному развитию мобильных и видеотехнологий. С появлением высокотехнологичных смартфонов и повсеместными селфи, актуальными стали и так называемые селфи-дроны – миниатюрные беспилотники с камерой, позволяющие делать отменные селфи и видео.
Сложности в управлении

Новичок на этапе обучения может столкнуться с некоторыми трудностями контроля. В основном они связаны с пространственной ориентацией аппаратика и координацией движений стиков, что, надо сказать, по началу действительно очень непривычно.
Однако для таких случаев многие производители (в частности бюджетных модификаций) предусмотрели такую полезную функцию, как Headless Mode. Она меняет ориентацию дрона таким образом, что пилоту не нужно задумываться о том, где у квадрона зад, а где перед.
БПЛА и современное законодательство
В настоящее время на законодательном уровне действуют определенные ограничения в контексте применения и использования квадрокоптеров. Например, каждый дрон весом 0,25 – 30 кг подлежит регистрации на территории РФ и подразумевает наличие у пилота полетной лицензии.
К тому же придется получать разрешение на полеты, для которого потребуется удостоверение летной пригодности, доступ к эксплуатации воздушного пространства и удостоверение правомерности БПЛА-пилотирования. Если планируется ведение съемки в определенных регионах, то потребуется также соответствующе разрешение.
Будущее дронов
На что еще способны и для чего нужны людям коптеры, кроме развлечений?
Уже сегодня довольно успешно применяются такие летательные аппаратики для помощи строительным бригадам при монтаже сложных, композиционных конструкций, в сельском хозяйстве, при съемках документальных фильмов формата BBC, и даже для транспортировки людей.
Последний пункт можно считать особо интересной, революционной перспективой в мире БПЛА. Отдельную статью, посвященную таким крупногабаритным беспилотникам вы можете найти на страницах нашего сайта.
Надеемся, статья оказалась полезной и познавательной для вас. Если так, подпишитесь на наши обзоры и расскажите о них друзьям/знакомым в соцсетях. Удачного освоения ваших первых беспилотников!
Загрузка…drongeek.ru
Квадрокоптер для человека: обзор технологий пассажирских дронов
Здравствуйте, дрономаны и любители захватывающего пилотирования высокотехнологичных коптеров! Наверняка для большинства наших читателей очевидно, что беспилотные технологии прогрессируют невероятно шустро, а интерес к ним со стороны СМИ подогревается еще быстрее. Квадрокоптер для человека стал надежным помощником, незаменимым в различных ситуациях.
Уже сегодня мы можем наблюдать, как коптеры выполняют множество задач и функций, причем, как в развлекательно-бытовой, так и в технической сфере. Но это совсем не останавливает производителей современных БПЛА от их совершенствования, создания новых идейных концептов и дальнейшего совершенствования собственных разработок.
В настоящее время квадрики широко используются для доставки гуманитарных грузов в разрушенные войной или природными катаклизмами точки, проведения масштабной разведки, проведения профессиональных и любительских киносъемок, помощи ремотно-строительным бригадам, службам надзора и другим ведомствам.
Одной из наиболее привлекательных перспектив можно считать транспортный квадрокоптер, способный перевозить людей. Эта революционная идея посетила разработчиков БПЛА сравнительно недавно, но уже сегодня компании из ОЭА, Китая и России готовы представить миру первые удачные прототипы летательных аппаратов для перевозки людей. Об успехах таких разработок и их перспективах мы поговорим сегодня.
Могут ли дроны перевозить людей?

Специалисты в области радио- и авиатехники уверены, что главное преимущество пассажирского квадрокоптера заключается в его сравнительной дешевизне, а также простоте эксплуатации и экологической безопасности. По прогнозам экспертов, такие воздушные мультикоптеры можно будет прировнять по стоимости к массовому легковому транспорту.
Компоновка летающего дрона, в которую включен ряд тяговых винтов, способствует снижению нагрузки на общую механику БПЛА, повышая, таким образом, износостойкость и надежность винтомоторных групп. В сочетании с этим техническим преимуществом современная электроника предельно упростит контроль таких квадрокоптеров и повысит степень безопасности при перемещении.
Как можно использовать дроны для перевозки людей?
Насколько же реальны такие полеты и возможны ли они в ближайшем будущем в принципе? Ответом на этот вопрос стала демонстрация первого БПЛА с человеком на борту – Hoverbike Scorpion 3.

Подробнее об агрегате и данном событии мы поговорим чуть позже, а сейчас давайте рассмотрим возможности транспортировки в нынешнее время и проблемы, которые мешают реализовать массовую транспортировку пассажиров посредством квадрокоптеров уже сегодня.
Говоря о возможностях эксплуатации коптеров для массовой транспортировки людей, специалисты предлагают десятки всевозможных вариантов, начиная с общественных транспортных единиц и заканчивая служебными ресурсами.
Уже сегодня в Китае увидели свет и были опробованы в различных погодных условиях «крылатые такси». Такой дрон для человека совершил более тысячи тестовых перелетов, пройдя испытание непогодой, темнотой и туманом. Такие уникальные такси отличаются высокой скоростью и, возможно, в скором будущем вытеснят привычные «шашки».
Еще один успешный опыт с дроно-такси был проведен в Дубае – там совершил свой первый рейс с пассажирами на борту такси-беспилотник. Транспортное средство, получившее название AAT, рассчитано на два пассажирских места и предлагает высокую скорость.
Вместе с тем набирают обороты разработки в сфере крупногабаритного пассажирского квадро-транспора, опять же с приветом из поднебесной. Такой вариант летающих «автобусов» будет не только быстрее и качественнее в плане перевозки, но также намного безопаснее, имея на борту продуманную и качественную программную оснастку.
Говоря о перспективах использования квадронов в этом контексте, нельзя не упомянуть служебный транспорт в виде машин корой помощи. Перспективы использования таких летательных единиц действительно воодушевляют – такой транспорт будет прибывать четко в срок, следуя по оптимально составленному маршруту и заранее сообщая абоненту примерное время прибытия. Возможно, вызов такого средства будет полностью автоматизирован, что позволит исключить человеческий фактор и все вытекающие особенности.
Наконец, не стоит забывать о перспективах применения квадронов в военно-стратегических целях. Машина сможет перебрасывать подразделения по безопасным маршрутам, действуя в режиме «стелс» и помогая оператору в навигации.
Какие проблемы мешают развитию беспилотных перевозок сегодня?
В настоящее время к числу наиболее существенных проблем технического характера можно отнести поиск новых технологий АКБ высокой мощности. В идеале такие батареи должны иметь оптимизированное соотношение собственного веса к емкости, а также долговечности и токоотдаче. Пока что современные коптеры для человека способны летать до 23-25 минут на максимальной скорости 130 км/ч, что специалисты считают неплохим, но не удовлетворительным показателем.

Другая проблема заключается в организации. В большинстве мировых государств действуют очень жесткие правила в отношении воздушного транспорта и его эксплуатации. Эти правила были определены и закреплены в законодательстве большинства стран в соответствии с требованиями к безопасности и антитеррористическим законодательством.
По сути, это две основные проблемы глобального масштаба, которые хоть и ограничивают, но не пугают разработчиков инновационных воздушных систем для перевозки людей. В последние годы такие беспилотники стали предметом активного изучения и внедрения во многих странах мира. В этом отношении не отстают и отечественные конструкторы.
Безопасность
Это один из ключевых вопросов, которым разработчики крупногабаритных коптеров уделяют особое внимание. Конструкция мини-квадов, как показала практика, обеспечивает ему прекрасные летные характеристики. Даже при сильных столкновениях или внезапном падении добротно собранные квадрики на радиоуправлении сохраняют свою целостность.

В их более крупных аналогах для человека планируется внедрить компенсаторные антиаварийные механизмы, которые снизят риски падений, а также получения существенных повреждений и травм пассажиров при нештатных ситуациях.
Кроме того, совершенствующееся из года в год ПО исключит человеческий фактор, автоматизируя полеты, составляя быстрые и безопасные маршруты, и обеспечивая адекватную ситуации реакцию коптера.
Разработка специальных полетных контроллерных плат и средств управления идет полным ходом. Центральный процессор, интегрированный в такие платы, будет способен обрабатывать множество задач одновременно и контролировать различные летные параметры в реальном времени.
Прототипы
А теперь более подробно о прототипах и первых попытках поднять человека в воздух при помощи летательной квадомеханики. Вышеупомянутый Scorpion 3 – детище российского стартапа Hoversurf, был представлен не так давно в демонстрационном видеоролике на YouTube. Аппарат представляет собой третью итерацию гибрида квадрокоптера и гоночного мотобайка.

Представители Hoversurf говорят о создании в будущем аппарата, который будет доступен обычному человеку. Первый прототип был изготовлен в 2016 году. К своему третьему воплощению Scorpion получился более мощным и оптимизированным в плане управления. На платформе этого агрегата по заявлениям разработчиков можно будет создать полноценный летомобиль грузового/пассажирского класса.
Концепция управления здесь строится вокруг бортовой компьютерной системы, позволяющей совмещать ручное и автоматическое управление. Производитель разработал собственное ПО, призванное ограничить характеристики квадрона для безопасных любительских полетов (изначально конфигурация оборудования рассчитана на экстремальные, спортивные перелеты.)
В настоящее время скорость полета ограничена 50 км/ч, а полетная высота – 3 метрами. Время пребывания машинки в воздухе составляет 27 минут при максимальном взлетном весе 250 кг.
Характеристики
- Полетная высота –3м
- Полетный вес – 250 кг
- Скоростной показатель – 50 км/ч
- Время заряда энергетических блоков – до 27 минут
- Тип двигателей – электро-турбинные
- Длина агрегата
- Тип управления – ручное/автоматика
Ehang 184
Настоящей, вполне серьезной и относительно удачной попыткой построить парящий массовый транспорт будущего стал дрон Ehang-184, представленный одноименной компанией-производителем в рамках выставки CES-2016 в США.

Вес квада составляет 200 кг, а максимальный скоростной показатель равен 100 км/ч на высоте 3,5 км. Весьма внушительные показатели, за исключением продолжительности полета, которая на момент презентации даже не дотянула до получаса.
Зато уже сейчас мультикоптер полностью удовлетворяет всем условиям транспортировочной безопасности, обеспечивая комфортные и быстрые перелеты для людей. Далее приведем подробные технические/летные характеристика аппарата, доступные в настоящий момент в рамках десятков тестовых полетов.
Характеристики
- Полетная высота –3,5км
- Полетный вес – 200 кг
- Скоростной показатель – 100 км/ч
- Время заряда энергетических блоков – до 23 минут
- Тип двигателей – электронные, турбинные (4x, 250 л.с.)
- Длина агрегата – 5,5 метров
- Тип управления – ручное/автоматика
Другие попытки
Еще одним из интересных изысканий в этом направлении стала летающая доска Fly-board-Air, которая создавалась компанией Zapata Racing более 4-х лет. Для управления ховербордом используется пульт дистанционного радиоуправления. Подъем в воздух осуществляется благодаря четырем газотурбинных двигателей мощностью 250 л.с.
Топливный бак устройства реализован в виде ранца за спиной пилота, заправленный авиационным керосином марки Jet-A1. Емкости такого бака хватает на 4 минуты пилотирования. Максимально достигаемая высота составляет 30 метров, а скорость – 55 км/ч. Сам же исходный прототип для закрытых технических тестов, по заверению разработчиков, обладает куда более внушительными показателями – время перелетов – 10 минут, высота – 3км, скорость – 150км/ч.
Будущее беспилотных перевозок
В настоящее время разработчики стремятся к созданию целой авиационной системы, которая будет способна обеспечить круглосуточную транспортировку людей со средним достатком. По сути, речь идет о внедрении новой разновидности общественного транспорта.
Также в этом контексте речь может идти о расширении и модернизации транспортно-служебной инфраструктуры в большинстве развитых стран мира. Такие перспективы видятся вполне реальными в ближайшие 10 лет для экономически развитых государств. В частности, речь идет о Китае, США, Японии, России, ОАЭ и пр.
Если вы нашли этот обзор захватывающим, полезным и интересным, поделитесь им с друзьями и знакомыми в соцсетях. Также приглашаем вас подписаться на наши обзорные циклы и следить за актуальными, интересными событиями в мире гражданской авиации. До новых встреч!
Загрузка…drongeek.ru
Как управлять квадрокоптером
В этой небольшой, но очень полезной инструкции мы расскажем вам, как управлять квадрокоптером на радиоуправлении и затронем такие темы как:
- рычаги управления
- стабилизация и режимы
- советы перед первым полетом
Поехали!
Рычаги управления
Несмотря на то, что в мире существует десятки разнообразных пультов управления, они созданы по одинокому принципу: каждый из них оснащен как минимум двумя рычагами управления (их называют также стиками или джойстиками), что отвечают за ориентацию квадрокоптера в воздухе: его движение вдоль трех осей координат и вращение.
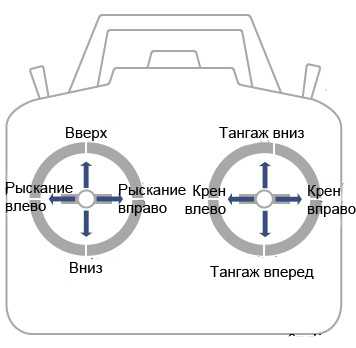
Вот как может выглядеть пульт дистанционного управления:
Давайте разберем рычаги управления подробнее.
Левый рычаг отвечает за перемещение квадрокоптера в вертикальной плоскости и его вращение вокруг этой плоскости:
- Вверх/Газ (Throttle up) — при перемещении стика вверх квадрокоптер будет набирать высоту.
- Вниз/Тормоз (Throttle down) — при перещении его вниз, квадрокоптер будет спускаться.
- Рыскание влево (Yaw left) — при перемещении правого рычага влево, квадрокоптер будет поворачиваться на месте влево.
- Рыскание вправо (Yaw right) — при перемещении правого рычага вправо, квадрокоптер будет поворачиваться на месте вправо.
Правый рычаг отвечает за тангаж и крен:
- Тангаж вниз (Pitch down) — «нос» (передняя часть) квадрокоптера будет наклонена вниз.
- Тангаж вверх (Pitch up) — «нос» (передняя часть) квадрокоптера будет наклонена вверх.
- Крен вправо (Roll right) — при перемещении джойстика влево, коптер наклониться в левую сторону.
- Крен вправо (Roll right) — при перемещении джойстика вправо, коптер наклониться в правую сторону.
Стабилизация и режимы
Современные квадрокоптеры могут летать в нескольких режимах. Обычно у радиоуправляемого дрона бывает 3 режима полета, но может быть и больше. Среди них:
- Ручной режим полета (Manual mode). Это значит, что управление квадрокоптером полностью на ваших плечах и никакие внутренние системы не стараются его удерживать ровно в горизонтальной или вертикальной плоскости. Самый сложный режим, но самый интересный.
- Стабильный режим полета / Режим ориентации в пространстве (Attitude mode, не путать с Altitude mode). В этом режиме используется акселерометр и вы не сможете делать дроном различные трюки в воздухе. Режим для новичков, которым нужно освоиться с управлением коптером.
- Стабилизация при помощи системы GPS. Квадрокоптеры, в которых встроен GPS, могут управляться также в этом режиме. Он предназначен для тех случаев, когда нужно снять качественные кадры на видеокамеру, установленную на коптер.
Кроме того, при наличии GPS возможно автопилотирование, удерживание высоты или направления полета и другие функции.
Советы
Перед тем, как вы отправите квадрокоптер в его первый полет, не забудьте:
- полностью его собрать: установить шасси (если имеются), прикрепить пропеллеры, произвести установку других деталей;
- взять с собой запасной аккумулятор и/или автомобильную зарядку (если собираетесь выезжать на автомобиле) — перед тем, как привыкнуть к управлению квадрокоптером, вы потратите некоторое время, что может равняться максимальному времени работы одного аккумулятора;
- взять запасные детали на случай поломки: пропеллеры ломаются чаще всего;
- настроить компас и GPS (если есть).
Также рекомендуем следовать вам этим советам, особенно новичкам:
- запускайте квадрокоптер на открытых пространствах: это не только увеличит радиус действия пульта ДУ, но и является известной мерой предосторожностью — вы же не хотите сломать квадрокоптер, врезавшись в кого-то или что-то?
- при первых полетах летайте в стабильных режимах, потом переходите к ручному. Это повысит шансы на выживание коптера;
- не запускайте квадрокоптер во время сильного ветра и плохой погоды;
- не запускайте квадрокоптер в очень людном месте, если только вы не полностью научились управлять им и контролировать его движение.
Видео
Вашему вниманию подборка видео на тему «как управлять квадрокоптерам». постарались собрать лучшие, если вы также нашли интересное видео на эту тему — сбрасывайте его в комментариях.
Пошаговое обучение управлению квадрокоптером
Какие рычаги управления на что влияют и другая информация (на английском)
Как управлять квадрокоптером. Часть 1 (на английском)
Как управлять квадрокоптером. Часть 2 (на английском)
Вконтакте
Google+
Одноклассники
LiveJournal
Понравилось? Поделитесь с друзьями, нам будет очень приятно 🙂
quadrocoptery.ru
Принцип работы квадрокоптера и некоторые ньюансы

Обычно, людей, которые впервые сталкиваются с дронами, прежде всего, интересует происхождение названия устройства, а уже затем, если они начинают интересоваться ими всерьез, непременно возникает желание понять, как же квадрокоптер работает и летает. Ну что ж, в этом мы сейчас и разберемся.
Устройство квадрокоптера
Здесь все довольно просто, хотя, сложность устройства во многом зависит от его класса. В целом, схема одна – дрон представляет из себя устройство, состоящее из:
- центрального корпуса, в котором находится защищенная оболочкой электроника;
рамы, на которой закрепляются пропеллеры; - крепления для камеры, и, собственно, самой камеры.
Правда, последний пункт относится только к более продвинутым аппаратам. А вот как выглядит небольшой квадрик «изнутри»: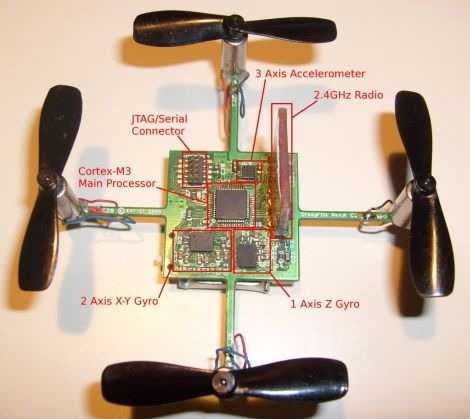
Вроде и сложного ничего нет, но, важную роль играет качество компонентов и их слаженное взаимодействие друг с другом.
Принцип работы квадрокоптера
Сбалансированность полета и хорошая управляемость дрона обеспечивается вращением пропеллеров в противоположные стороны – одна пара вращается по часовой стрелке, а одна – против нее.
С помощью пульта, человек может отдавать команды каждому из винтов, от чего и зависит, как квадрокоптер летает:
- при вращении всех винтов с одной и той же скоростью, аппарат взлетает;
- если один из пропеллеров вращается быстрее, чем остальные – коптер наклоняется и начинает двигаться в соответствующую сторону;
- если одна пара пропеллеров начинает вращаться быстрее, квадрокоптер поворачивается в сторону.
Интересное по теме:
quatrocopter.com
Как управлять квадрокоптером: пошаговая инструкция
Так сложилось, что новички, никогда раньше не имевшие дел с квадрокоптерами считают, что это очень сложная техника. На практике же получается совершенно противоположная ситуация. Освоить полет на летающей машине крайне просто. Но стоит отметить, что владельцу все же придется потратить немного времени на обучение, так как квадрики имеют ряд отличий от других радиоуправляемых игрушек. Итак, как управлять квадрокоптером?
Пульт и все, что с ним связано
Как вы уже догадались никакие курсы управления заканчивать не нужно, а управлять дроном придется с помощью специального пульта. По сути, все пульты для квадрокоптеров стандартны и слегка напоминают джойстики для игровых приставок. Они оснащаются двумя рычагами управления, где левый обычно связан с движением в вертикальной плоскости, а правый в горизонтальной.
Если вы нажмете на левом рычаге джойстика вверх, то аппарат начнет набирать высоту, а если вниз — то он будет опускаться вниз. При этом вправо и влево отвечает за вращение дрона вокруг своей оси.
За тангаж и крен отвечает правый рычаг. При нажатии вниз — нос квадрика опустится. Если нажимать вверх, то он начнет подниматься. При этом вправо и влево отвечают за наклоны в соответствующую сторону.
Некоторые современные модели также имеют поддержку управления через приложение в смартфоне. При этом сам дрон и телефон нужно соединить через WiFi.

Режимы
Перед запуском обязательно нужно ознакомиться с режимами, которые встроены в ваш дрон.
- Ручной полет. Это самый сложный режим, но в то же время и самый интересный. В нем вы полностью берете управление на себя, а никакая дополнительная стабилизация не работает. Отлично подходит для тех, кто уже немного освоился в управлении и хочет поднять свой уровень мастерства пилотирования и научиться исполнять трюки.
- Стабильный полет. Он рассчитан на съемку фотографий или видео. Выбирая его, в работу вступает встроенный акселерометр, который позволит стабильно удерживать аппарат в воздухе. Этот режим можно назвать режимом для новичков, который идеально подойдет для всех тех, кто только что приобрел оборудование.
- GPS навигация. В этом режиме можно задать маршрут, по которому дрон сделает пролет. Своего рода автопилот и удобная фишка, особенно если вы не хотите контролировать каждый шаг своего БПЛА.
- Управление дроном с телефона. Каждая современная модель квадрокоптера может управляться со смартфона или планшета (причем работает и на Android и на iOS). Дрон ведёт прямую трансляцию картинки, которую захватывает его камера. Ее отображает мобильное устройство, подключенное к коптеру напрямую через WiFi. Очень полезная вещь, рекомендуем!

Первый запуск и подготовка к нему
Итак, ваш новый квадрокоптер уже перед вами, но вы пока не умеете его запускать. С чего начать?
- Первым делом нужно собрать дрон. Почти все они поставляются в частично разобранном виде, поэтому навыки сборки конструктора вам очень пригодятся.
- Припасите запасной аккумулятор. Современные модели редко могут протянуть в воздухе больше 10 минут. А для полноценной тренировки этого времени не достаточно.
- Обязательно прикупите несколько запасных частей. Аварии неизбежны, а особенно часто ломаются именно пропеллеры.
- Далее следует откалибровать и настроить датчики: акселерометр, компас и GPS.
Остается только бегло просмотреть прилагаемую инструкцию и можно попробовать поднять в воздух свой первый аппарат.
Как научиться поднимать квадрокоптер?
Ни в коем случае не торопитесь, и не старайтесь поднять его на огромную высоту. Для начала можно обойтись простыми маневрами.
Например, попробуйте взлететь, развернуть дрон, отдалить его от себя на несколько метров. Если вы новичок, не стоит тренироваться в помещениях. Для этого лучше найти спокойную и тихую площадку, где отсутствует ветер. Почему погода должна быть безветренной? Прежде всего, вы сможете научиться ощущать квадрокоптер, привыкнуть к тонкостям его управления.
Кроме того, ветряной поток способен вызывать ряд сложностей во время полета. Нередко приходилось сталкиваться с ситуациями, когда новички не успевают быстро остановить устройство, и оно врезается в окружающие предметы.
Советы и типичные ошибки
На первых этапах никогда не запускайте аппарат слишком высоко, особенно в тех ситуациях, когда недалеко от вас находится огромное количество людей. При совершении малейших ошибок техника может не только упасть и сломаться, но также травмировать окружающих людей. Вращающиеся лопасти могут нанести серьезные увечья.
Останавливайте свой выбор на безлюдных местах, желательно не асфальтированных. Таким образом, когда устройство всё-таки упадет, оно не получит сильные повреждения корпуса.
Если вы новичок, никогда не направляйте аппарат сторону рек. Затем, уже после освоения базовых навыков, вы сумеете полноценно пользоваться квадрокоптером над реками, на территории парков и мест, где сосредоточено большое количество людей.

Неопытным пользователям не нужно приобретать дорогостоящие модели. Вне зависимости от аккуратности обучения управлению или места для тренировочных полетов, всё-таки нередко приходится сталкиваться с ситуацией, когда коптеры падают. С другой стороны, техника предлагает широкие возможности для новичков, упрощающих маневрирование в сложных местах – четвертые Фантомы даже анализируют обстановку с помощью бортовых датчиков, предотвращая столкновения.
Перед тем как начать тренировку, заранее убедитесь в том, что аккумуляторная батарея, установленная на борту, полностью заряжена. Категорически запрещается запуск летательных устройств, в которых заряд батареи составляет не более 50%. Во-первых, тренировка окажется непродолжительной, а во-вторых, при наборе большой высоты устройство может полностью разрядиться ещё в воздухе.
Беспилотник — это устройство с простой схемой управления. Набравшись немного практики, вы сами убедитесь в этом.
Загрузка…drongeek.ru