Словарь терминов. Что такое квадрокоптер?
Квадрокоптер — беспилотный летательный аппарат с 4 пропеллерами, что обычно размещаются по краям коптера. Русское название «квадрокоптер» — калька с английского «quadcopter«, что переводиться как 4-роторный вертолет. Примеры квадрокоптеров: DJI Inspire 1, Phantom 2 Vision Plus.
Мультикоптер — общее название для беспилотных летательных аппаратов, у которых количество пропеллеров (несущих винтов) больше, чем 2. Образовано от слов «multi» (несколько) и «copter» (вертолет).
Гексакоптер — беспилотный летательный аппарат с 6 пропеллерами, что обычно размещаются по краям коптера. Название произошло от слов «hexa» («гекса«, с древнегреческого — «шесть«) и «copter«. Пример гексакоптеров: DJI Flame Wheel ARF KIT, DJI S900.
Октокоптер — беспилотный летательный аппарат с 8 пропеллерами, что обычно размещаются по краям коптера. Название произошло от слов «
Коптер — сокращение от слова «helicopter«, вертолет. Используется либо по прямому назначению, либо как обозначение беспилотного летательного аппарата с n-ым количеством несущих винтов.
Дрон — беспилотный летательный аппарат. Часто это название применяется для обозначения квадрокоптеров и других мультикоптеров, что является ошибкой, поскольку дроном называются беспилотники военного назначения, внешний вид которых существенно отличается от коптеров.
Ready-to-Fly — собирательное название для мульткоптеров, что не требуют сборки. Дословно это выражение можно перевести как «готовый к полету». Как правило, для первого полета таких мультикоптеров нужно лишь зарядить аккумуляторную батарею и, в некоторых случаях, откалибровать компас.
У компании DJI Innovations есть две серии таких квадрокоптеров (Inspire и Phantom).
Flying Platform (дословно «Летающая платформа») — собирательное название для мультикоптеров, в базовом комплекте с которыми идет лишь корпус с лучами, моторы, крепления и комплект проводов. Чтоб этот коптер взлетел, к нему нужно докупать дополнительные аксессуары.
Луч — вытянутая «рука» коптера что отходит от центральной платформы. Именно на лучах крепятся пропеллеры.
Карданная подвеска/(моторизованный) шарнир — крепление и одновременно стабилизатор для камеры, что крепиться к коптеру снизу.
Центральная платформа — основа коптера, его база. К ней крепятся все остальные части: лучи, крепление для камеры, передатчики и прочее.
FPV-камера — камера, что передает видео в режиме онлайн, но которая не предназначена для записи видео. Расшифровывается как «камера от первого лица» или «камера, что позволяет смотреть от первого лица».
Вконтакте
Google+
Одноклассники
LiveJournal
Понравилось? Поделитесь с друзьями, нам будет очень приятно 🙂
quadrocoptery.ru
Почему квадрОкоптер, а не квадрАкоптер? В интернете встречаю только через «о», но и «дельтОплан» тоже встречался нередко
Я постоянно твержу: Интернет не эталон грамотности, скорее, наоборот. Пишут здесь разные люди, с разным уровнем образования, потому и ориентироваться на статьи Интернета в написании слов нельзя. Вам, как я поняла, не понравилось, что пишется не саентология, как Вы часто видите в Интернете, а сайентология. И это уже норма, зафиксированная словарями, что я Вам и показала на скриншотах в ответе на Ваш вопрос https://otvet.mail.ru/question/187065206, но Вы почему-то никак не хотите принять за истину положение о том, что лучший друг корректора – словарь, а не Интернет, благо, что в Сети сейчас масса онлайн-словарей известных авторов: Ожегова, Ефремовой, Кузнецова, Зализняка, орфографический РАН и пр. (а ещё корректор должен отлично знать теорию языка, ибо без этого знания никак не разобраться во многих сложных вопросах орфографии, пунктуации и других разделов лингвистики).Вот и со словами ДЕЛЬТАПЛАН и КВАДРОКОПТЁР надо обращаться к словарям, а не смотреть, как их употребляют пользователи.
А словари говорят: есть сложные слова, первая часть которых ДЕЛЬТА (по названию греческой буквы). А так как название буквы склоняется (дельту, дельтой), то при образовании сложных слов – ДЕЛЬТАПЛАН, ДЕЛЬТАКЛУБ, ДЕЛЬТАДРОМ – флексия превращается в интерфикс, ЧАСТЬ СЛОВА, НАХОДЯЩУЮСЯ МЕЖДУ ДВУМЯ КОРНЯМИ (соединительные гласные О и Е в сложных словах – разновидность интерфикса). В простых (несложных) словах интерфиксы тоже встречаются – между морфемами, но не о них сейчас речь.
Слово КВАДРОКО́ПТЕР ещё настолько новое в русском языке, что пока фиксируется лишь словарём Зализняка, но объяснить выбор гласной О можно и с помощью других словарей.
А словари говорят, что КВАДРО- [от лат. quadri- – четырёх] – первая часть сложных слов. Сначала эта часть употреблялась для обозначает отнесённости чего-либо к записи и воспроизведению звуков по ЧЕТЫРЁМ каналам стереофонической системы. Отсюда и пошли слова КВАДРОСИСТЕМА, КВАДРОЗВУК, КВАДРОЗАПИСЬ.
Позже эта часть КВАДРО- появилась и в слове, со звукозаписью не связанном, но в значении которого латинское ЧЕТЫРЕ играет существенную роль. Это слово КВАДРОЦИКЛ – вид мотоцикла, но с четырьмя колёсами. А совсем недавно появилось и слово КВАДРОКО́ПТЕР, значение которого прекрасно объясняется в зафиксированном Национальным корпусом русского языка предложении:
«Так, заглянув на популярный западный сайт thingiverse.com, я обнаружил, например, комплектующие части портативного квадрокоптера – самостабилизирующегося вертолёта с четырьмя роторами, гораздо более устойчивого, чем обычный вертолет». (Александр Волков, «Третья промышленная революция»).
ПЕНТА- [< греч. pente пять] – первая составная часть сложных слов, соответствующая по значению слову пять: ПЕНТАХОРД, ПЕНТАГРАММА.
Так что механизм, образующий сложные слова с первой частью ДЕЛЬТА-, ПЕНТА- и КВАДРО-, в русском языке же выработан, потому и те слова, которые появятся в языке спустя время, тоже будут писаться с А, если их первая часть ДЕЛЬТА- или ПЕНТА-, и с О, если их первая часть КВАДРО-.
Квадроциклы и квадрокоптеры так стремительно входят в нашу жизнь, что, думаю, скоро, кроме словаря Зализняка, будут фиксироваться и другими словарями, исключая, конечно словарь Ожегова, ибо жадность его наследников остановила многолетнюю работу Шведовой по «осовремениванию» этого словаря, который без её вмешательства уже превращается в такой же анахронизм, как словарь Даля или словарь Ушакова.
А ПЕНТО́Д – слово сложносокращённое, в словаре это показано: пент (а) + (электр) од.
otvet.mail.ru
Квадрокоптер Википедия

Мультикоптер (англ. Multirotor, multicopter, многороторный вертолёт, многолёт) — это летательный аппарат построенный по вертолётной схеме с тремя и более несущими винтами[1].
История
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Один из первых квадрокоптеров (англ. quadcopter, четырёхроторный вертолёт), который реально оторвался от земли и мог держаться в воздухе, был создан Георгием Ботезатом и испытан в 1922 году. Недостатком этих аппаратов была сложная трансмиссия, передававшая вращение одного мотора на несколько винтов. Изобретение рулевого винта и автомата перекоса положило конец этим попыткам. Новые разработки начались в 1950-е годы, но дальше прототипов дело не продвинулось.
Новое рождение мультикоптеры получили в XXI веке, уже как беспилотные аппараты. Благодаря простоте конструкции квадрокоптеры часто используются в любительском моделировании[2]. Мультикоптеры удобны для недорогой аэрофото- и киносъёмки — громоздкая камера вынесена из зоны действия винтов[источник не указан 149 дней].
Самолёт Curtiss-Wright X-19 использует при взлёте и посадке принцип квадрокоптера
Модель транспортного средства-гексакоптера
Октокоптер для персональных полётов
Принцип действия
По принципу управления мультикоптеры бывают[3]:
- автономные
- дистанционно-управляемые (беспилотные)
Мультикоптеры имеют 3 или более винтов постоянного шага (автомата перекоса, в отличие от одно- и двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина — против, поэтому рулевой винт мультикоптеру не нужен. Маневрируют мультикоптеры путём изменения скорости вращения винтов. Например:
- ускорить все винты — подъём;
- ускорить винты с одной стороны и замедлить с другой — движение в сторону;
- ускорить винты, вращающиеся по часовой стрелке, и замедлить вращающиеся против — поворот.
Микропроцессорная система переводит команды радиоуправления в команды двигателям. Чтобы обеспечить стабильное зависание, мультикоптеры в обязательном порядке снабжают тремя гироскопами, фиксирующими крен аппарата. Как вспомогательный инструмент, иногда, также используется акселерометр, данные от которого позволяют процессору устанавливать абсолютно горизонтальное положение, и бародатчик, который позволяет фиксировать аппарат на нужной высоте. Также, применяют сонар для автоматической посадки и удержания небольшой высоты, а также для облёта препятствий. И самое главное — GPS-приемник, позволяющий записывать маршрут полёта заранее, с компьютера, а также, возвращать аппарат в точку взлёта, в случае потери управляющего радиосигнала, или снимать параметры полёта оперативно или потом
Существуют также трёх- и пятивинтовые вертолёты (три- и пентакоптеры). Один из моторов там располагается на нанизанной на ось подвижной платформе, угол поворота которой изменяется сервоприводом — так и осуществляется поворот аппарата вокруг своей оси[5]. Отдельно стоит отметить экспериментальные аппараты: бикоптеры, квадрокоптеры с изменяемым шагом пропеллеров, квадрокоптеры с двигателями на импеллерах, однако они не получили какого-либо распространения.
По вариантам размещения винтов в отношении оси движения и в зависимости от их направления вращения различают несколько типов мультикоптеров:
Современное применение мультикоптеров
Современное применение мультикоптеров весьма разнообразно, от игрушек и любительских средств для фото- видеосъёмок, контрабанды товаров, до пассажирских и грузовых транспортных средств, боевых роботов[6][7][8][9].
В любительских и профессиональных мультикоптерах используются коллекторные и бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника энергии
Это накладывает определённые ограничения на их полётные характеристики: типичная масса мультикоптера составляет от 1 до 4 кг, при времени полёта от 10 до 30 минут (30—50 минут у уникальных единичных экземпляров). Поднимаемый полезный груз моделями мультикоптеров среднего размера и грузоподъёмности — от 500 г до 2—3 кг, что позволяет поднять в воздух небольшую фото или видеокамеру (обычно экшн-камера в более дешёвых моделях, либо зеркальные камеры в профессиональных). Существуют и достаточно крупные модели мультикоптеров, с количеством роторов порядка 6-8 (гекса и октокоптеры), способные поднять в воздух груз массой до 20-30 кг. Для увеличения грузоподъёмности применяют соосное расположение несущих роторов, что в случае гексакоптера, например, даёт 12 моторов и 12 пропеллеров, расположенных попарно на 6 несущих лучах. Скорость полёта мультикоптера может быть от нуля (неподвижное висение в точке) до 100—110 км/ч. Запас энергии батарей позволяет отдельным моделям мультикоптеров улетать на расстояние до 7-12 км, на практике же радиус действия (максимальное расстояние, на которое они способны улететь с последующим возвратом в точку взлёта) обычно ограничено прямой видимостью (100—200 м при ручном управлении) либо дальностью действия аппаратуры радиоуправления и видеолинка. При этом лучшие образцы подобной аппаратуры, использующие усилители мощности радиосигнала и систему направленных антенн, способны обеспечивать стабильные радиоуправление и видеолинк на расстояния до 100 км. Таким образом, наибольшее ограничение на радиус действия мультикоптеров накладывает именно время полёта.
Эти ограничения приводят к тому, что мультикоптеры обычно используются как аппараты «ближнего радиуса действия»: для любительских полётов недалеко от себя, для фото-видеосъёмки близко расположенных объектов и так далее. Для сравнения, беспилотные самолёты с аккумулятором аналогичной ёмкости могут улетать на 10—15 км при высоте полёта 1—2 км.
Миниатюрный квадракоптер передающий изображение со встроенной камеры на смартфон по Wi-Fi
Миниатюрный квадракоптер, с пультом упраления с возможностью установки планшета как приёмника видеосигнала
Квадрокоптер для профессиональных фотосъёмок с креплениями для цифровых фотоаппаратов
Квадрокоптер визуального контроля окружающего пространства для силовых структур «Грифон-41»
Экспериментальный квадрокоптер «Ehang 184»
Прототип волокоптера «2X»
Безопасность полётов
В отличие от самолёта, который способен планировать с выключенным двигателем, или вертолёта, который способен сесть с помощью авторотации, мультикоптер при отключении моторов или электропитания, полностью неуправляем. Квадрокоптер при отказе одного из двигателей может сохранять стабилизацию. Гексакоптер или октокоптер помимо этого могут совершить мягкую посадку с одним неработающим мотором, однако не во всех случаях (например, при разрыве хотя бы одной лопасти вибрация из-за дисбаланса увеличивается настолько, что контроллер перестаёт работать, и аппарат переходит в неуправляемое падение). Но уже существуют экспериментальные квадрокоптеры, которые могут стабилизировать полёт и совершить посадку при потере одного из двигателей[11].
Учитывая то, что мультикоптер имеет немалую массу, жёсткий корпус и быстро вращающиеся пропеллеры, его столкновение с людьми или автотранспортом может привести к негативным последствиям. Поэтому полёты над людьми или автодорогами не рекомендуются. Желательно планировать траекторию полёта так, чтобы в случае необходимости (например, при разрядке батареи) внизу было место для безопасной посадки.
Важен и человеческий фактор. Современный полётный контроллер по сложности настройки и количеству полётных режимов почти не уступает настольному компьютеру. Невнимательное чтение документации, отсутствие выполнения необходимых действий (например, калибровки компаса при настройке) могут привести к неуправляемому полёту и потере аппарата. Вылет аппарата за радиус действия пульта при отсутствии режима GPS-возврата также является одной из причин потерь аппаратов.
В целях безопасности некоторые модели дистанционно управляемых мультикоптеров оборудуют дублирующими системами навигации и позиционирования, элементами интеллектуальной роботизации способствующими самостоятельному определению летательным аппаратом препятствии на маршруте полёта и их облёту, защитными кожухами винтов или всего летательного аппарата, самостоятельным возвратом к месту пуска при утере сигнала управления[12][13][7][10].
Мультикоптеры-игрушки
В последнее время появились миниатюрные квадрокоптеры, умещающиеся на ладони (Walkera Ladybird, WLtoys V929, Blue Arrow nano Loop и пр). Они практически безопасны (масса аппарата около 40 г), в то же время, позволяют получить основные навыки полёта на мультироторном аппарате, так как принцип их управления ничем не отличается. Квадрокоптеры такого размера возможно запускать дома, не рискуя нанести вред людям или предметам.
Миниквадрокоптер с зарядкой через USB
Квадрокоптер «Robbe Blue Arrow Nano Loop»
Миниквадрокоптер с пультом управления
Октокоптер в полёте
Квадрокоптер Parrot AR.Drone 2.0 с управлением по Wi-Fi при помощи смартфонов/планшетов вместо пульта упраления
См. также
Примечания
Литература
- Яценков В. С. Электроника. Твой первый квадрокоптер. Теория и практика // СПб.: БХВ-Петербург. — 2017. — 256 с. ISBN 978-5-9775-3586-1.
Ссылки
wikiredia.ru
Отличия и сходства понятий дрон, БПЛА и квадрокоптер
В средствах массовой информации на профильных сайтах или просто в разговоре можно нередко встретить такие термины, как “БПЛА” (жаргонное: беспилотник), “дрон”, “квадрокоптер“. Причем, часто эти слова используются как синонимы.
Можно ли использовать эти термины в качестве синонимов? Чем похожи БПЛА, квадролеты и дроны? Этот ликбез поможет ответить на данные вопросы.
Краткие определения для нетерпеливых:
- Дрон – любой беспилотный аппарат. То есть аппарат без экипажа на борту. Дрон не обязательно летает. Например, танк без экипажа тоже будет называться дроном.
- БПЛА – это то же самое, что и дрон, но аппарат обязательно летательный. На это указывает расшифровка аббревиатуры – беспилотный летательный аппарат.
- Квадрокоптер – это, грубо говоря, вертолет с четырьмя точками крепления воздушных винтов. Его можно назвать одновременно и дроном, и БПЛА, и радиоуправляемой моделью. Но если мультикоптер пилотируемый, использовать другие термины из заголовка статьи для его описания нельзя.
БПЛА и дрон
В современном мире термины “дрон” и “БПЛА” стали синонимами. Словом дрон можно назвать любой БПЛА (но не наоборот), но к радиоуправляемым летательным аппаратам он неприменим. История радиоуправляемых моделей началась тогда, когда БПЛА и дронов не было. Причем, от радиоуправляемых самолетов и вертолетов они отличаются кардинально.
“Дрон” – просто красивый термин, используемый в сводках новостей, и подразумеваться под ним может и БПЛА, и мультикоптер. Люди, чья деятельность или хобби связаны с БПЛА, сильно зажмуриваются, когда слышат слово “дрон”.
Чтобы написанная выше информация стала более понятной, нужно привести несколько примеров. Есть дроны, которые используются военными для обучения. Например, самолет самостоятельно взлетает и продолжает движение, пока команда, тренируемая поражению целей, не собьет его. Вместо самолета может использоваться корабль или подводная лодка.
Беспилотный автомобиль, разрабатываемый командой Google X, тоже можно назвать дроном. Термин “дрон” также применим в отношении роботов-саперов или роботов-разведчиков. Хотя разработчики подобной техники предпочитают название “робототехнический комплекс”.
На БПЛА устанавливаются сложные системы датчиков, комплексы автопилотирования, управления, наблюдения и контроля. Разведку или наблюдение с их помощью вести намного проще, чем с пилотируемых самолетов. При этом некоторые образцы БПЛА могут оснащаться вооружением.
Резюмируя: термины “дрон” и “БПЛА” сегодня применяются для описания одних и тех же аппаратов, но их не всегда можно использовать в качестве синонимов.

Дрон и квадрокоптер
Квадрокоптер (или квадролет) – это вертолет с четырьмя несущими роторами. Сегодня такие аппараты очень популярны из-за своих небольших габаритов и массы. В отличие от вертолетов той же грузоподъемностью на обучение управлению мультикоптером требуется намного меньше времени. Эта информация в равной мере относится и к пилотируемым аппаратам, и к беспилотным.
Конечно, специалисты заметят, что определение нужно дополнить, и сказать, что квадрокоптер представляет собой мультикоптер именно с четырьмя роторами. Мультикоптер же может оснащаться четырьмя, тремя, шестью, восемью и более моторами.
Для правильного употребления терминов важно знать, что квадролет и дрон – это не разные вещи. Дрон – робот, используемый в военных целях, спасательных операциях, исследований. Квадрокоптер – просто конструкция. В качестве аналогии можно привести родственные слова “автомобиль” и “седан”, или “самолет” и “истребитель”.

Квадрокоптер и мультикоптер
Мультикоптер – понятие менее конкретное, чем квадролет. Трикоптеры, гексакоптеры, октокоптеры – это тоже мультикоптеры. Единственная разница – в количестве воздушных винтов. В большинстве случаев в СМИ под мультикоптером подразумевают квадрокоптер.
Квадрокоптер поднимают в воздух четыре ротора – два вращаются в одну сторону, два – в другую. Винты, как правило, параллельны земле. Поток воздуха движется сверху вниз. Больше ничем квадрокоптер от дрона и БПЛА не отличается. Использование всех этих устройств одинаково: спасательные операции, фото и видеосъемка, научные и метеорологические исследования, разведка местности, мониторинг трафика.
Но чтобы определить, какой термин применим к конкретному аппарату, нужно задать вопросы: “Робот ли он? Кто управляет машиной: человек при помощи радиосвязи или программные алгоритмы?”
БПЛА может выполнять большинство действий самостоятельно: взлетать, садиться, перемещаться в воздухе. Оператору остается только следить за действиями аппарата. Управление на себя он берет только в непредвиденной ситуации, и управляет БПЛА удаленно. Говоря проще, БПЛА – машина, летающая самостоятельно. Если квадрокоптер удовлетворяет этому требованию, значит, он БПЛА.
На современные мультикоптеры установлено множество интеллектуальных систем. Благодаря им обучение пилотированию можно выполнять самостоятельно, и это не займет много времени. Главное – заранее прочитать инструкцию.
Если же отключить основные системы: движение при помощи навигации по GPS, телеметрию, передачу видео в реальном времени, – квадролет перестанет быть дроном или БПЛА и станет радиоуправляемой авиамоделью (но останется квадрокоптером), управлять которой на дальности, превышающей остроту зрения пилота, станет невозможно.
Поэтому принятый недавно закон об обязательной регистрации беспилотных воздушных судов массой более 0,25кг не имеет особого смысла. Однако под его действие попадают почти все любительские авиамодели и квадрокоптеры (ставшие в последнее время популярными).
Выводы
В современном мире термины “квадрокоптер”, “БПЛА” и “дрон” зачастую используются неправильно. Слова “дрон” и “беспилотник” определяют в первую очередь такое свойство аппаратов, как отсутствие экипажа на борту. Название же “квадрокоптер” указывает исключительно на конструкцию воздушного судна.

kopterinfo.ru
Из чего состоит квадрокоптер
Если вы решили собрать квадрокоптер своими руками, то вам необходимо знать из чего сегодня состоят эти мультироторные летающие машины.
И так, в первую очередь необходимо выбрать чертежи квадрокоптера подходящей модели – определиться с размером рамы, количеством моторов и их расположением, а также типом микропроцессорной системы контроллера полета квадрокоптера, которая будет определять набор датчиков, стабилизацию, отвечать за полет, а также обеспечивать дополнительные возможности аппарата. Выполнение всех этих задач зависит именно от правильного выбора платы.
Основательное продумывание деталей при выборе нужных технических характеристик квадрокоптера позволит в дальнейшем использовать его с максимальной эффективностью. Например, если аппарат приобретается для ведения аэрофотосъемки, то необходимо подобрать модель, способную удерживать в полете дополнительный вес аэрофотосъемочного комплекса.
К основным составляющим квадрокоптера относятся следующие детали.
• Рама

Рама является важной составной частью этого летательного аппарата, поскольку обеспечивает надлежащий внешний вид, правильное распределение узлов и нагрузок, а также простоту проведения ремонтных работ.
Раму можно изготовить в домашних условиях при помощи подручных средств, или же приобрести в готовом виде и только собрать. На сегодняшний день в свободной продаже имеются самые разные виды рам. В целом она выглядит как перпендикулярно пересекающиеся рейки с пластиковой крестовиной посредине для крепления платы. На сегодня самый распространенный вариант рамы предполагает использование алюминиевых профилей и крестовины из текстолита. Если есть желание потратить по больше денег, то используются карбоновые трубы вместо алюминия. У некоторых видов квадрокоптеров рамы имеют усиленную портативность – они могут складываться и удобно переноситься.
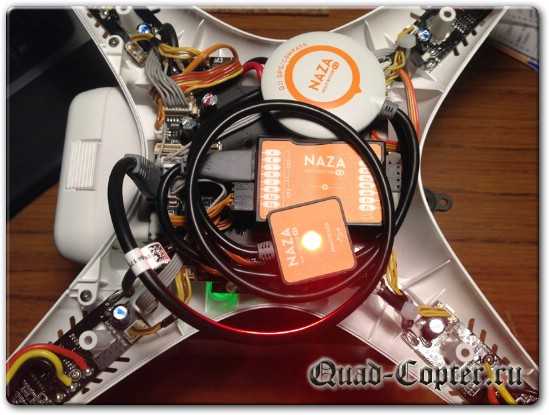
• Плата-контроллер

Как уже говорилось раньше, эта вещь является предопределяющим условием работы аппарата, отвечает за его функциональность и в целом летные возможности. Невзирая на свою компактность (около 5 см х 5 см), у нее есть все необходимое для работы самодельного квадрокоптера.
При креплении платы-контроллера следует помнить, что она должна размещаться на одной линии с линией вращения винтов. Кроме того очень важно уберечь плату от вибрации при соприкосновении с рамой. Чем выше виброизоляция, тем стабильнее летает квадрокоптер, особенно в автоматических режимах. Не стоит забывать также и о защитной крышке, которая убережет плату от повреждений и пыли. Последней очень много при взлете и посадке.
• Моторы

Жестких требований при выборе моторов не существует – можно выбрать любой вариант с вращением 800-1200 об/вольт для 3S аккумулятора. Мощность электродвигателя зависит от предполагаемых размеров и назначения квадрокоптера.
Если вы собираете квадрокоптер для Drone Racing, то на него ставятся небольшие моторы с оборотами в 2200-2300, смотрите статью 10 моторов для Drone Racing для более подробного ознакомления с этими электродвигателями.
• Электронный регулятор оборотов двигателя

При выборе этой детали следует неукоснительно соблюдать некоторые правила:
— Выбирать самое маленькое время отклика (от него зависит точность управления при полете).
— Провести калибровку регуляторов до первого полета. Избегать наличия функции защиты от помех в условиях быстрых осцилляций газа от платы-контроллера (использование такого регулятора может привлечь к отключению аппарата в полете).
— Обратить внимание на возможность перепрошивки регулятора специальной коптеровской прошивкой или взять Afro регулятор (они уже прошитые).
• Пропеллеры
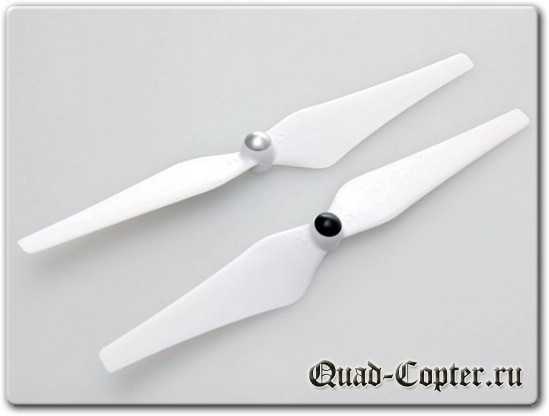
Для создания простейшего квадрокоптера понадобится два пропеллера, вращающихся влево, и два пропеллера вращающихся вправо. Таким образом, легко можно представить принцип их работы и возможность держать в воздухе устройство.
Пропеллеры должны быть узкими, с малым шагом винта. На практике устанавливают попарно пропеллеры разных цветов – таким образом можно будет идентифицировать переднюю и заднюю часть аппарата.
• Соединения
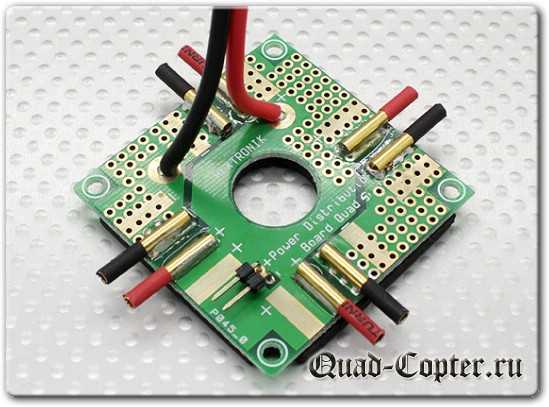
Ввиду наличия нескольких деталей, собранных на одной раме (пропеллеры и плата), становится проблемой правильно разложить и закрепить провода. Хорошим выходом из положения станет специальная плата из текстолита, которая имеет разведенные дрожки питания. Именно к ним можно припаять провода и подвести освещение.
О том, как соединить все это вместе смотрите статью — Соединение электроники квадрокоптера.
• Маркировка и навигация

Готовый квадрокоптер имеет правильную форму и четкую симметрию, потому нужно его каким-то образом маркировать, обозначив переднюю часть. Как писалось ранее, многие используют разноцветные пропеллеры или разноцветные светодиодные ленты.
Удобным способом маркировки может быть установка специального шара, а также правильное освещение — подсветку квадрокоптера, которая будет отчетливо видна в вечернее и ночное время. При свете дня переднюю часть можно легко различить и при помощи специальной раскраски.
• Разнообразные показатели
Для работы квадрокоптера понадобится довольно много датчиков, например, обязательно наличие трех гироскопов и акселерометров – это тот минимум, который обеспечит полет и отлаженное управление. Вместе с тем, на специализированных форумах можно найти множество советов о дополнительных возможностях и необходимых для этого датчиках. Также выбор будет зависеть и от задач, которые возложены на квадрокоптер.
Так, к примеру, для автоматического возврата при потере связи контроллер квадрокоптера должен иметь GPS антенну и преобразователь сигналов. Для четкого контроля высоты полета — бародатчик.
Стоит также отметить такую полезную деталь, как показатель заряда аккумулятора и датчики, позволяющие определить местонахождение аппарата в случае его потери. В качестве последнего может выступать установленный в квадрокоптер GPS треккер. В случае потери квадрокоптера с помощью него можно точку, где он приземлился при окончании батареи.
• Установка камеры

Принцип крепления камеры должен быть тщательно продуман. На малых моделях квадрокоптеров преимущество отдается обычной жесткой фиксации. Вместе с тем, в более сложных моделях камера крепится на подвесе, который гиростабилизирует съемочную камеру, а так же может управляться с пульта. Стабилизация видео делает съемку более качественной и резкие дерганья квадрокоптера не сказываются на записи видео.
В качестве камер для квадрокоптера отлично зарекомендовали себя экшенкамера SJ4000 и экшенкамера SJ4000.
Похожие статьи:
Видеоподборки про RC моделизм → Сборка гоночного Дрона на формованной раме и регуляторе 4в1
Аксессуары квадрокоптеров → Недорогой DC-DC конвертер
Видеоподборки про RC моделизм → Сборка бешеного квадрокоптера!! 3дюйма 5S Lipo! (I)
Квадрокоптер своими руками → Сборка миниквадрокоптера под FPV
Видеоподборки про RC моделизм → Хватит жечь дорогую электронику!!!
Квадрокоптер своими руками → Как соединить электронику квадрокоптера
Аксессуары квадрокоптеров → Регуляторы для самодельного квадрокоптера
Видеоподборки про RC моделизм → Делаем коннексолёт с регулятором 4-в-1
quad-copter.ru
квадрокоптер — Перевод на английский — примеры русский
На основании Вашего запроса эти примеры могут содержать грубую лексику.
На основании Вашего запроса эти примеры могут содержать разговорную лексику.
Не говоря о том, что вы сломали мой квадрокоптер.
Это квадрокоптер, но особенный — на привязи.
Я могу вам долго рассказывать о простоте использования, но лучший способ это доказать — взять второй квадрокоптер и запустить его.
Now, I can tell you that it’s easy a lot, but I think a really good way to prove that is to grab a second one and launch it.Когда мы их соединяем, получаем квадрокоптер с высокими лётными качествами.
When you put them together, they behave like one high-performance quadrocopter.Предложить пример
Другие результаты
В лаборатории Пенсильванского университета Виджай Кумар иего команда создают летающих квадрокоптеров — маленьких, быстрыхроботов, похожих на рой. Они чувствуют друг друга и сообщавыполняют команды по строительству, осмотру зон бедствия и многомудругому.
In his lab at Penn, Vijay Kumar and his team build flyingquadrotors, small, agile robots that swarm, sense each other, andform ad hoc teams — for construction, surveying disasters and farmore.В данном случае жилет передаёт девять параметров с этого квадрокоптера: тангаж, рыскание, крен, положение и направление, и это улучшает способность пилота им управлять.
So in this case, the vest is streaming nine different measures from this quadcopter, so pitch and yaw and roll and orientation and heading, and that improves this pilot’s ability to fly it.Некоторые из них могут быть вооружены HD камерами и способны отслеживать протестующих, или, как видно из этого отрывка видео, квадрикоптеры могут быть вооружены огнестрельным автоматическим оружием.
Some can be armed with HD cameras and do countersurveillance on protesters, or, as in this little bit of movie magic, quadcopters can be loaded with firearms and automatic weapons.Успокойся, это наш квадрокоптер-шпион.
Это проект по созданию квадрокоптера.
context.reverso.net
Разница между квадрокоптером и дроном
В чём разница между дроном и квадрокоптером? Правильный ответ… ни в чём! Вопрос сам по себе поставлен не совсем корректно: фактически, перед нами два названия одной и той же вещи. Если ещё точнее, то любой квадрокоптер – это дрон, но не любой дрон – квадрокоптер.

Дроном называют любой беспилотный летательный аппарат. То есть, крутые беспилотники НАСА – это тоже дроны, просто другого класса. Ну а коптер – в нашем случае квадро – это вполне конкретный вид указанных беспилотников.
Особенности, характерные для квадро-
Отличается данная категория дронов наличием четырёх моторов и винтов. Бывают также коптеры с 2, 3, 6 и 8 винтами, но наибольшее распространение получили именно четырёхдвигательные модели. Связано это с тем, что такая конструкция обеспечивает оптимальное соотношение между ценой модели, её качеством, стабильностью поведения в воздухе, простотой управления, грузоподъёмностью и кучей других факторов.

Более маленькие дроны чувствительны к порывам ветра, более крупные – это уже профессиональный класс, предназначенный для выполнения серьёзных задач. Вот и получается, что нарицательным названием для всего класса коптеров в народе стал именно квадрокоптер.

В общем-то, именно модели этой категории и будут Вас интересовать, если Вы только начинаете свой путь в небеса с использованием беспилотников. Среди четырёхвинтовых красавцев есть много подходящих для новичков моделей, которые идеально Вам подойдут!
Также советуем прочитать уникальную и интересную статью, про квадрокоптеры. В этой статье детально разобран вопрос о том, как выбрать квадрокоптер.
gevis.ru